松灵行业应用|轨道巡检OEM方案,荣获香港工程师学会优异奖
转载 2024-05-24 13:57 松灵机器人 来源:松灵机器人
轨道巡检运维
OEM解决方案

行业背景
随着轨道交通运营规模的扩大,传统的人工巡检手段已经不能满足日益旺盛的维保要求,长距离与高重复的检测作业成为地铁及城市轨道交通运维工作中的一大痛点,探索一种智能化、信息化、少人化甚至无人化的维保模式,将为轨道交通维保探索更大的发展空间。
01
场景痛点
巡检作业时间长,需要在特定时间夜间作业。凌晨上班已然是“家常便饭”,深夜面对精密的仪器进行巡检作业,难免会有错漏,错检、漏检等概率也随之提高。
巡检作业环境复杂,在封闭式的轨道环境下,噪音较大、空间狭小、人工检修困难,不可长时间持续作业。

那么,面对这样的行业需求,
我们能给出怎么样的解决方案?
02
解决方案
双臂升降式巡检机器人
双臂升降式巡检机器人是一款专为轨下场景设计的巡检机器人,机器人的持久耐劳、环境适应性强、精准检测等优势能为轨道维保提供有力的保障。
针对巡检的功能需求,可以将机器人划分为以下功能模块。
软件部分:自研NAVIS导航系统(含任务规划)
硬件部分:
|实现功能
自主导航+自主避障
自主充电(含定时与可调节阈值)
任务模式支持点位设置(控制机械臂、升降柱、线性滑轨运动)
http与webbsocket接口支持全平台调用
升降机构与线性模组保证大范围工作空间
前后双32线雷达+视觉相机补盲
磷酸铁锂电池供电支持快速更换
双6轴长臂展机械臂

|关键技术参数
| 移动方式 | 四驱四转,自主导航 |
| 最大工作范围 | 200万㎡ |
| 末端自由度 | 6自由度 |
| 末端定位精度 | ±0.05mm |
| 末端负载 | 3kg |
| 续航能力 | ≥4h |
| 充电时间 | 1h |
| 整机高度 | ≤800mm |
| 最高工作高度 | 1800mm |
|方案优势
极致的工业设计
搭载六维力传感器的双机械臂
工业级四驱四转底盘
业务逻辑与导航控制策略极致融合
全平台兼容二次开发接口

03
应用案例
某地铁运维企业轨下巡检机器人
地铁在结束运行后,回到场站,午夜间需要人工在铁轨下对地铁进行检测。
人工巡检工作时间长、作业强度大、巡检效率低。
引入机器人进行轨下巡检作业,可以减少人力,提高工作效率,更好的保证地铁运行安全。
|方案描述
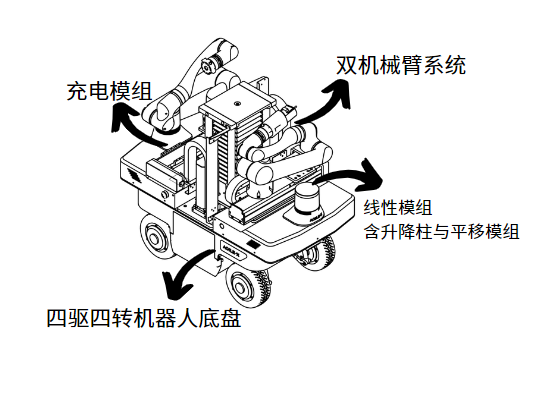
依据巡检需求,巡检机器人硬件部分设计采用四驱四转RANGER MINI 3.0机器人底盘、双机械臂系统、线性模组(含升降柱与平移模组)、双32线激光雷达、充电模组,以更好的完成轨下环境的检测作业;软件部分为自研智能NAVIS导航系统(含任务规划),以实现精准检测。

|作业逻辑
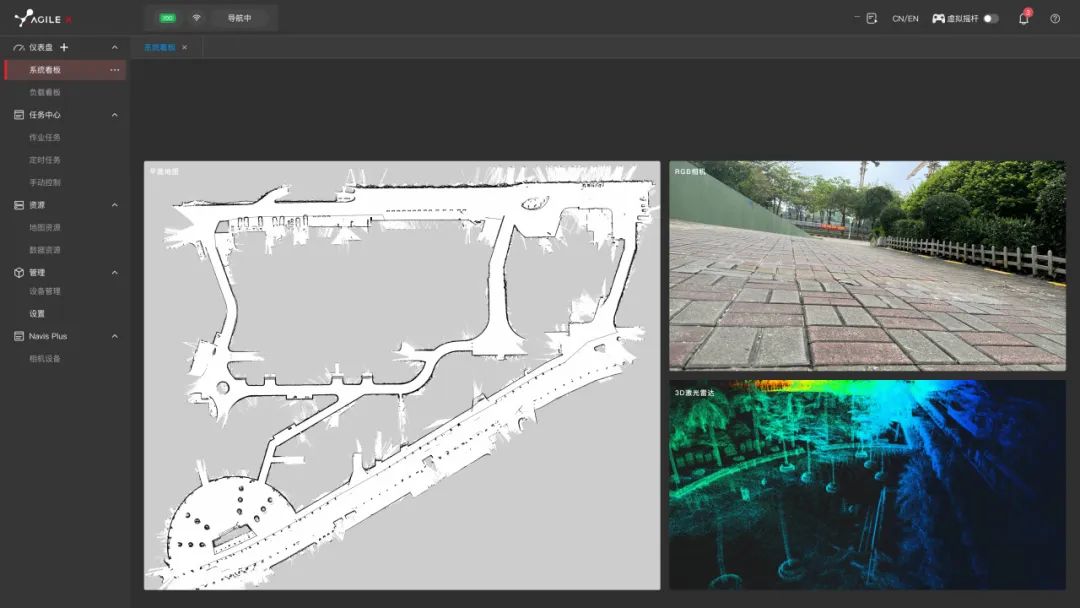
整体作业逻辑如下:在地铁入库停稳后,启动智能巡检机器人,通过WEB平台下发任务,智能巡检机器人从充电桩停止充电后开始执行任务。
机器人利用前后双激光雷达实现对轨下环境的精确定位,开始整车巡检,升降柱、机械臂与滑轨联动末端设备进行巡检作业,并通过车载路由模块将信息传输至局域网设备终端。
任务完毕后,机器人驶出检测区域,自动导航回待机充电位进行充电,等待下一次任务的下发。

部分作业流程演示
|项目效益
轨下巡检机器人在地铁检修通道中运行,能代替人工完成地铁日常维护工作中的车底检修任务,解决了人工检修所面临的作业时间久、巡检工作量大、检测难全面等问题,节省了巡检人力成本,提高了巡检效率,为地铁维保探索了新的模式。
|项目资讯
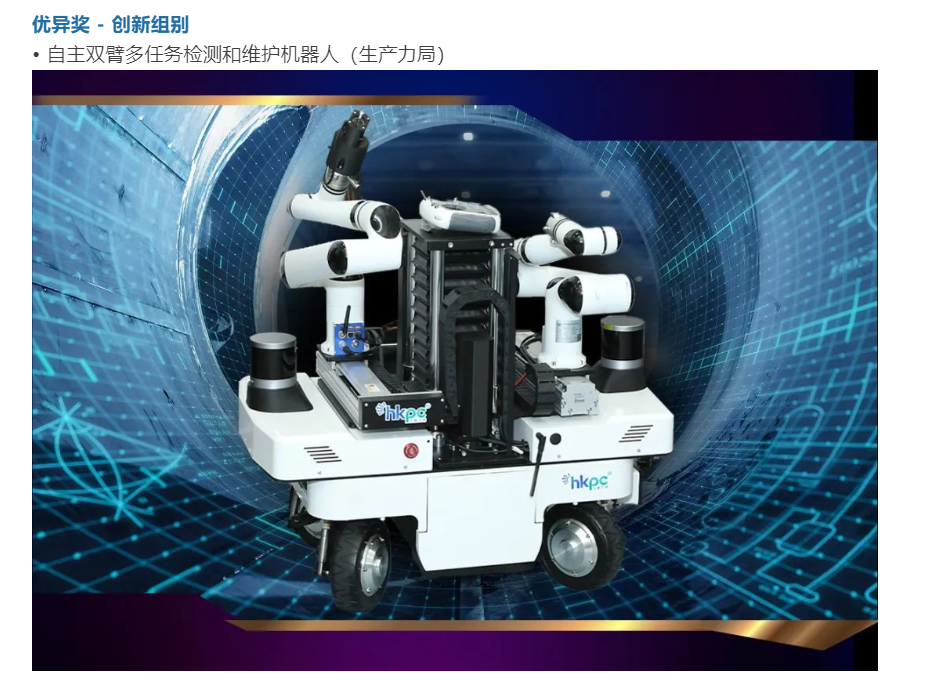
自主双臂多任务检测和维护机器人荣获香港工程师学会"HKIE MIS Industry Award 2023”创新组别-优异奖。
04
更多方案

松灵支持更多定制化需求
欢迎联系我们沟通OEM方案!
相关资讯
更多- ALL IN 细节:中力股份携全场景数智方案亮相LogiMAT 2026
- 榕城聚势·搬易无忧——MiMA“C计划”走进福州暨福州营销服务中心产品推介会圆满落幕!
- 从“看见”到“看懂”,上海海思 X 迈尔微视全栈dToF方案赋能具身智能跃迁
- 从“看见”到“看懂”,上海海思 X 迈尔微视全栈dToF方案赋能具身智能跃迁
- 聚焦新质生产力!林德自动化亮相2026物流技术大会,共探智慧物流新未来
- 凯乐士科技成功登陆港交所
- 杭叉集团|共谋发展,共创未来——加拿大代理商代表团访问杭叉
- 全球布局--寻迹智行海外标杆项目案例分享
- 展会邀请|合肥搬易通(MiMA米玛)诚邀您参加3月26日-28日第114届全国糖酒商品交易会!
- Vision China 2026丨华睿科技邀您共聚上海机器视觉展 赋能工业新时代