MIT教授开发用感觉抓取物品的机器抓手
原创 2022-05-10 10:37 南山 来源:中国AGV网
在最近的一个项目中,美国麻省理工学院(MIT)计算机科学与人工智慧实验室 (CSAIL )的机械工程博士生 Edward Adelson(爱德华-阿德尔)教授和 Sandra Liu (桑德拉 刘)开发了一种机器人抓手,使用新颖的“GelSight Fin Ray”手指,就像人的手一样,它足够柔软以操纵物体。
一个大型金属机器人,用单调的语调说话,用笨重的步伐移动,这样的概念有点难以撼动。但是,软体机器人领域的从业者在脑海中有一个完全不同的形象--由顺应性部件组成的自主设备,触感温和,比R2-D2或机器人罗比更接近于人类的手指。
爱德华-阿德尔森教授和他在麻省理工学院计算机科学和人工智能实验室(CSAIL)的感知科学小组现在正在追求这种模式。在最近的一个项目中,阿德尔森和桑德拉--CSAIL的一名机械工程博士生--已经开发了一个使用新型 "GelSight Fin Ray "手指的机器人抓手,它像人类的手一样,足够柔软,可以操纵物体。这项工作与该领域其他工作的不同之处在于,刘和阿德尔森为他们的抓手赋予了触摸传感器,这些传感器可以达到或超过人类皮肤的灵敏度。
他们的工作上周在2022年IEEE第五届软体机器人国际会议上发表。
由于德国生物学家 Leif Kniese 在 1997 年的发现,鳍射线已成为软机器人中的热门项目。他注意到,当他用手指推鱼尾时,光线会朝着施加的力弯曲,几乎拥抱他的手指,而不是倾斜离开。这种设计已经流行起来,但它缺乏触觉敏感度。“它用途广泛,因为它可以被动地适应不同的形状,因此可以抓取各种物体,”刘解释道。“但为了超越该领域其他人已经完成的工作,我们着手将丰富的触觉传感器整合到我们的抓手中。”
抓手由两个灵活的鳍射线手指组成,它们符合它们接触的物体的形状。手指本身是由 3D 打印机上制造的柔性塑料材料组装而成,这在该领域是相当标准的。然而,通常用于软机器人抓手的手指具有贯穿其内部长度的支撑横梁,而 Liu 和 Adelson 将内部区域挖空,以便为相机和其他感官组件腾出空间。
摄像头安装在镂空腔体一端的半刚性背衬上,腔体本身由 LED 照明。相机面对一层由硅胶(称为“GelSight”)组成的“感官”垫,该垫粘在一层薄薄的丙烯酸材料上。亚克力板依次连接到内腔另一端的塑料指状件上。触摸物体后,手指将无缝折叠在物体周围,与物体的轮廓融为一体。通过准确确定硅胶和丙烯酸板在这种相互作用过程中如何变形,相机以及随附的计算算法可以评估物体的一般形状、表面粗糙度、空间方向以及由(和传授给)每个手指。
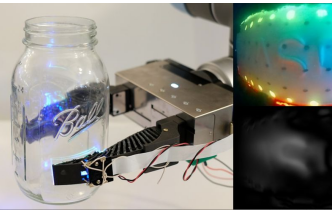
刘和阿德尔森在一项实验中测试了他们的抓手,在该实验中,只有两个手指中的一个被“感知”了。他们的设备成功地处理了迷你螺丝刀、塑料草莓、丙烯酸涂料管、Ball Mason 罐和酒杯等物品。例如,当抓手拿着假草莓时,内部传感器能够检测到其表面的“种子”。手指抓住油漆管,但没有用力挤压,以免破坏容器并溅出里面的东西。
GelSight 传感器甚至可以辨认出梅森罐上的字母,并且以一种相当聪明的方式做到了。罐子的整体形状首先是通过观察亚克力板在包裹它时如何弯曲来确定的。然后通过计算机算法从硅胶垫的变形中减去该图案,剩下的只是由于字母而引起的更微妙的变形。
由于光的折射,玻璃物体对于基于视觉的机器人来说是一个挑战。触觉传感器不受这种光学模糊性的影响。当抓手拿起酒杯时,它可以感觉到酒杯的方向,并确保酒杯在慢慢放下之前是笔直向上的。当底座接触桌面时,凝胶垫感应到接触。10 次试验中有 7 次正确放置,谢天谢地,在拍摄该实验期间没有损坏玻璃。
没有参与这项研究的卡内基梅隆大学机器人研究所助理教授袁文振说:“用软体机器人进行传感一直是一个巨大的挑战,因为很难将传统上是刚性的传感器设置在柔软的身体,”袁说。“这篇论文为这个问题提供了一个巧妙的解决方案。作者使用了一种非常智能的设计,使他们的基于视觉的传感器适用于顺从的抓手,从而在机器人抓取物体或与外部环境交互时产生非常好的结果。该技术有很大的潜力被广泛用于现实环境中的机器人抓手。”
刘和 阿德尔森 可以预见 GelSight Fin Ray 的许多可能应用,但他们首先考虑进行一些改进。通过挖空手指为他们的感觉系统腾出空间,他们引入了一种结构不稳定性,一种扭曲的倾向,他们认为可以通过更好的设计来抵消这种倾向。他们希望制造与其他研究团队设计的软机器人兼容的 GelSight 传感器。他们还计划开发一种三指夹持器,可用于拾取水果和评估其成熟度等任务。
在他们的方法中,触觉传感基于廉价的组件:相机、一些凝胶和一些 LED。刘希望通过像 GelSight 这样的技术有可能提出既实用又负担得起的传感器。至少,这是她和实验室其他人正在努力实现的目标。