技术干货|识别专栏之形状识别
转载 2021-12-02 11:14 仙工智能 来源:仙工智能

识别专题
形状识别
#1为什要进行形状识别?
货架的摆放不是一直都能固定在某个位置上的,当AGV 要对货架进行一些拉取或者顶升等操作时,需要精准的知道货架的位置,此时 AGV 自身在地图上的定位是准确的,但是货架的位置在地图上却是未知的,这样我们需要对货架进行识别来确定货架的位置。而某些场景要求不能对货架腿进行改造(如粘贴反光膜等),这个时候就需要对货架腿的形状做识别。
#2货架腿形状识别要求
1、一般情况下,货架是有四条腿,要求四腿形成一个矩形;
2、货架设计的其他部分都要求成轴对称的形式,包含:和顶升机构配合的限位孔、货架腿上支撑的货架部分;
3、货架内侧宽度要比机器人最大宽度宽 20cm,也就是左右各冗余 10cm 的钻货架调整空间;
4、货架高度要求,根据顶升模块的行程确定;
5、货架腿的表面要求为光滑平整的;
6货架腿的形状最好为规则型的方体;
6、货架腿的表面不能为呈镜面反射的材料;
7、货架腿的表面不能为半透明的材料;
8、货架腿的表面不能为黑色的材料;
下图为比较典型的可用的货架腿:

#3参数配置说明
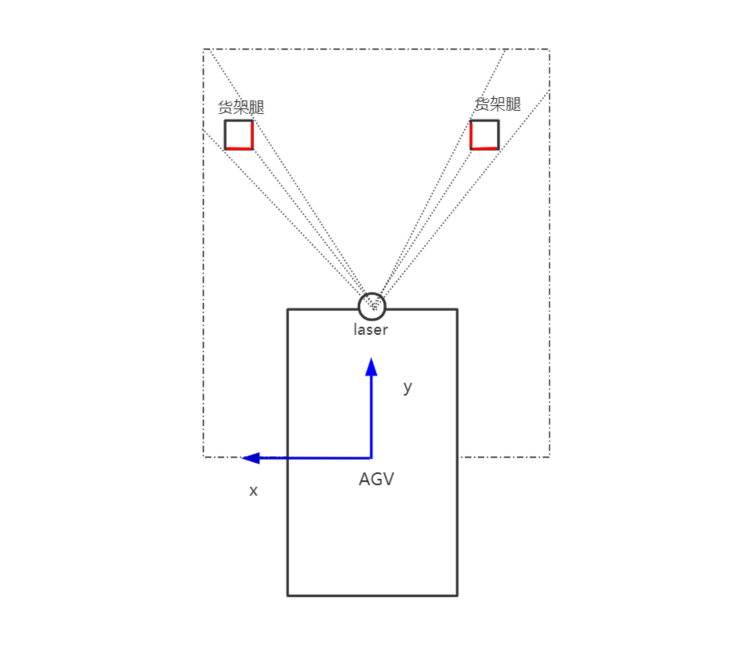
上图为激光雷达形状识别示意图,图中蓝色坐标系为AGV的车体坐标系,虚线方形为可配置的激光雷达识别区域,方形中的虚线为激光雷达扫描scan的示意图。
在使用激光雷达形状识别的时候,要保证激光雷达的识别范围内存在待识别的货架腿,识别区域可根据现场环境进行配置;

如上图所示的几个参数表示激光雷达的识别区域,该参数需要根据现场实际环境进行配置,
ValidShapeX:车体坐标系下的最大识别距离,单位为 m;
ValidShapeBias:偏差量;
根据不同的识别方向,系统会自动计算识别范围,如识别示意图上所示的虚线框。
当 detect_direction 为 x 时,ValidShapeX 为车体坐标系下x方向的最大距离,即:0
相关资讯
更多- 天能与柯锐世开展战略合作 深化绿色循环产业协同发展
- 72.54亿、13连冠!中力首份ESG报告,走出怎样的绿色智造突围之路?
- 不止于属具:卡斯卡特以场景化方案赋能物料搬运新价值
- 独轮安防机器人走向量产:Rollo Robotics 获 370 万欧元种子前融资
- “低成本、可扩展”:Draganfly 和 Palladyne 合作开发用于防御的无人机群
- 超20M立库落地OPPO,生产柔性跃升,铸就智能仓储新典范!
- 璀璨落幕 | 牧星精彩亮相英国IMHX,柔性智能物流解决方案闪耀国际舞台!
- 加速智慧物流技术产业化!无人物流科创园项目签约落地成都青白江
- 相约土耳其,天能邀您共赴「HOW-Hub of Warehouse2025」
- 九月展讯 | 慧仓出击,链动全球