新型3D视觉技术适合不断发展的机器视觉任务
编译 2021-03-24 10:27 DDing 来源:AGV网3D视觉技术必须不断发展并适应不断变化的市场条件--尤其是在加速变化的时期,例如全球流行病几乎重塑了生活的方方面面。不同类型的3D适合许多行业的不同任务和应用。无论是立体视觉、激光三角测量、结构光、飞行时间(ToF),还是其他技术,3D成像技术都在同时发展,并扩展到更多的市场,帮助终端用户和OEM解决新的、具有挑战性的成像问题。
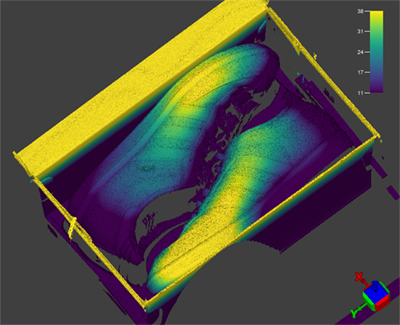
In-Sight 3D-L4000将3D激光位移技术与智能相机相结合,适合包括包装在内的各种机器视觉应用。
利用3D区域扫描技术
因为COVID-19,人们以前所未有的速度转向亚马逊和Instacart等电商平台,这对从事物流、仓储和包装的公司提出了巨大的需求,这些公司不得不不断扩大规模,扩大经营范围以跟上时代的步伐。物流和仓储应用--包括货物的交付、仓储和包装--在很大程度上依赖于各种类型的3D成像。
Integro Technologies公司首席视觉系统架构师David Dechow说:
"区域扫描和点云3D的实现是垃圾箱拣选应用所需要的,但尽管[垃圾箱拣选]可以说得到了最多的宣传,但它是最难实现的3D类型。[大多数垃圾箱拣选]还不能满足所有客户的需求,因为它需要极高速的随机拣选,并且要求机器人像人一样移动。但如果有一种应用如果能实现,那将是3D视觉的银弹,[垃圾箱拣选]就是它。"
使用飞行时间确定边框的尺寸和计数
虽然立体视觉和结构光等区域扫描3D技术可能有助于垃圾箱拣选应用,但飞行时间(ToF)有助于完成测量和计数箱等任务,例如:
Integro Technologies公司首席视觉系统架构师David Dechow说:
针对物流、材料处理和机器人应用,LUCID视觉实验室的新型Helios2 ToF相机与原始Helios相比,透光率提高了2.5倍,3D精度提高了50%以上。
LUCID视觉实验室创始人兼总裁Rod Barman说:
"无论我们提供什么技术,LUCID总是可以指望客户突破极限。考虑到这一点,我们在设计产品时,既要适应当前的应用,也要适应未来潜在的挑战,如尺寸测量、机器人和AGV。"
对于康耐视来说,物流领域3D应用的最大需求是箱体尺寸测量,零件在运动中移动。从历史上看,在这些应用中,多个激光器和一个外部摄像头帮助捕捉图像。但是,以3D-A1000系统为例,2D和3D一起使用的智能相机可以从网络界面快速进行尺寸测量,康耐视3D产品高级总监和业务部门经理John Keating解释说:
"有了康耐视和A-1000,就是设置的简单化。这是一个基于网络的界面,但它仍然是一个In-Sight相机,它提供了一个简单的设置演练。人们对3D变得越容易部署就越不害怕。"
Keating说,随着客户发现A-1000的成功,新的3D应用已经在物流领域开启,例如在经典的空托盘场景上定位物体,这在相当长一段时间内都是一个困难的应用。

LUCID Vision Labs的Helios2 ToF摄像头提供2.5倍的透光率,并且3D精度提高了50%以上,非常适合物流和机器人应用。
Larouche建议,就对市场的潜在影响而言,在3D成像方面可能会引起关注的一个潜在领域是将深度学习应用于3D成像以概括后者的用途。

Easy3D软件库是Euresys Open eVision软件的一部分,使客户能够开发自己的专用3D成像系统。
CapSen Robotics首席执行官Jared Glover表示,周期时间的考虑和后端包装封装应用程序也越来越依赖3D视觉,但最终用户和OEM必须考虑周期时间的需求,以避免任何问题。
他说:
“例如,在许多3D视觉引导机器人技术应用中,机器人的动作随位置或位置的变化而变化。与3D视觉引导机器人相比,您将不会拥有一遍又一遍的循环时间,而要一遍又一遍地重复完全相同的运动,这就是为什么将其纳入生产线设计中很重要的原因。应该在垃圾箱拾取机器人之前和之后创建额外的缓冲区,或者如果需要达到一定的循环时间且没有偏差,则应该添加额外的机器人以实现冗余。”
CapSen Robotics在设计CapSen PiC bin-picking产品时考虑了这些循环时间因素。该系统使用高度加速的专有GPU数学库以及并行图像处理和运动控制,在传统的6轴机器人上实现了仅2秒的循环时间。
康耐视凭借其新的In-Sight 3D-L4000嵌入式视觉系统,对3D在实际的后端包装过程中可以做的事情感到鼓舞。
Keating说:
“考虑到一个盒子,盒子里装满了瓶子,不得不处理倾斜之类的情况。”“当瓶子四处移动时,2D视觉会遇到问题,但是3D视觉提供了理解深度的能力。”
在客户解决包装问题的速度方面,康耐视看到了大量的回头客。例如,在客户需要查看低于较低级别的特定区域的情况下,3D解决了该问题。
Keating说,眼睛的包装打开速度比我们预期的快。

Photonfocus的Multipeak Linefinder算法可检测多个激光线轮廓,这有助于为检查任务找到合适的激光线。
软件为工厂
内外打开了新的大门3D视觉也使传统机器视觉以外的其他应用受益。以铁路检查为例。高速,恒定的振动以及恶劣的环境条件会使3D铁路检查应用变得困难。但是,正确安装后,检查导轨轮廓和轮辋是否磨损和损坏有助于防止事故并确保安全可靠的操作。这是Photonfocus的基于三角测量的相机的流行应用-使用外部激光和独立的相机而不是集成单元-因为它们在铁路上看到了一致甚至增长的业务。
Photonfocus为此类应用程序提供了一些特定的优势,其中包括称为LinLog的相机内固件功能,该功能使相机能够实时执行高动态范围成像。
美洲销售经理Mike Faulkner说:
“在摄像头指向下方的铁路应用中,可能会有一个漂亮的深色表面,允许集成商或最终用户在一定程度上控制该表面上的照明。一旦您开始上升并考虑到太阳等因素,就会很快产生问题。”
使用LinLog,用户可以同时处于明亮和黑暗的条件下,该技术提供了可以用于检查目的的平均图像。
检测多个激光线轮廓是一项复杂的检查任务。Photonfocus通过其Multipeak Linefinder算法提供了此功能。例如,当激光束在镜面物体上运行时,它会反弹,从而形成一条主线和许多副线。Photonfocus算法可帮助OEM查找正确的激光线以进行检查。
固件/设计负责人Reto Lienhardt说::
“ Photonfocus在3D算法方面拥有丰富的经验,我们始终根据客户需求对其进行改进。例如,当扫描金属或玻璃时,反射的固有问题可以在算法中解决。这是我们为客户实施多条并行检测的主要原因之一,也是为什么我们的3D解决方案与其他几个市场一起部署到铁路检测中的主要原因。”
对于希望开发自己的专用3D成像系统的机器制造商和系统集成商而言,诸如Easy3D库之类的软件工具(属于Euresys的Open eVision软件的一部分)可以开发3D机器视觉检查应用程序。例如,想要实现将一条或两条激光线投射到移动表面上的3D成像系统的客户需要提取激光线,然后可以将其转换为高度图或3D点云,这是3D中进行处理和分析所必需的,美洲销售和支持副总裁Mike Cyros解释说。
他说:“除了Easy3D软件库外,Euresys还通过我们的Coaxlink Quad 3D-LLE图像采集卡为此类应用提供现成的硬件,该软件可自动,实时地从CoaXPress相机中提取激光线。我们没有提供完整的固定功能3D解决方案,而是为客户提供了必要的构建基块,使他们能够更轻松地构建自己的3D视觉系统。Easy3D软件和Coaxlink Quad 3D-LLE为系统开发人员提供了易于使用的广泛功能。”
3D
成像技术不断发展3D成像技术不断发展,并可能达到拐点。人们开始将3D视为通用的术语,表示以不同方式创建3D图像的各种设备的集合,就像有2D相机以不同方式创建2D图像一样,John Keating建议。
他说:
“ 3D不能真正被视为一种技术,因为我们有基于激光的方法,飞行时间,立体视觉等等。我认为人们开始动摇他们对3D的先入之见,并且很快就会开始以更类似于2D的方式来思考它。”
甚至3D成像技术的名称也不同。许多公司没有在市场上用相同的名字来称呼他们的产品,但是任何其他名字的解决方案仍然可以提高生产率,这是最重要的。