海洋技术▏无人船系统应用于水库水样离岸采集——以棘洪滩水库为例
转载 2018-07-30 14:07 金久才等 来源: 溪流之海洋人生水库水质是地表水环境保护的重要内容,其监测数据是反映水质污染程度的重要依据,监测数据的准确性将对环境保护措施制定与执行产生重要影响。水质环境监测工作主要包括点位布设、水样采集与保存、实验室分析、数据处理和综合评价等5个环节,其中水样采集是环境监测工作的基础,其影响到监测数据的代表性、准确性、可比性和完整性。目前水质采样方法主要为人工现场取样,具体操作流程主要依据《地表水和污水监测技术规范》(HJ/T91-2002)。对于水库水样采集,常常受制于现场条件以及成本,一般只在水库入口和出口处的堤岸设置采样点位,这种采样方式的主要缺点是水样代表性差。因此,地表水体离岸监测点位取样是困扰环境监测的一个难题。
无人船(USV)是一种新型的多功能无人监测平台,其依托小型船舶,装载定位、导航与控制设备,可搭载多种监测传感器,以遥控或自主的工作方式,在走航过程中进行连续性监测。无人船工作于水面,大部分表面原位和剖面测量传感器均可搭载,例如CTD、叶绿素、溶解氧、流速仪、单/多波束测深仪、ADCP等,可应用于浅水湖泊、近岸、岛礁周边等复杂区域甚至大洋的多要素同步测量。近10年来,国内外已开发了多个无人船系统用于环境监测,例如英国普利茅斯大学开发了无人船“Springer”,搭载了水质监测传感器,应用于海洋环境监测。弗罗里达理工大学开发了“ASMV”无人船式浮标,搭载了温盐、气象、化学分析仪和荧光计,用于浮游植物监测。澳大利亚CSIRO ICT中心和昆士兰大学联合研发了水质监测无人船,通过加装水下测量杆,实现水质剖面测量。意大利国家研究理事会智能系统自动化研究所研制了两款水样采集无人船“SESAMO”和“Charlie”用于海洋表层水样采集,已在南极区域开展了相关实验。
本文针对水库水样离岸采集的需求,基于自研发的无人船系统,设计集成了水泵水样采集设备,实现了远距离遥控水样离岸采集。以青岛棘洪滩水库为例,开展了水样采集实验,并对水样进行了实验室分析。
一、无人船水样采集系统
自研发的无人船系统“USBV”是由岸基控制单元和无人船单元两部分组成,二者之间采用数传电台建立测量数据回传和控制命令下达链接,目前已应用于水深测量、抵近监视和水声通信等。
无人船“USBV”质量约130kg,长约2.8 m,宽约1.5 m,续航能力约20 km,船速在0~1.5 m/s范围内可调,通信距离超过10km。无人船电源使用24V和12V锂电池组,分别为推进系统和主控及传感器系统供电。无人船船体采用双体双推进方式,可进行前进、后退和转向遥控。在自动控制方面,具备无人船航向、位置、路径等自动控制功能,即按照岸基控制单元发送的期望航向、GPS位点和航线完成自动测量。目前“USBV”主要搭载了GPS、电子罗盘、姿态仪、测深仪、水上与水下摄像机、CTD、小型气象仪等传感器。为实现无人船水样采集,利用无刷电动水泵、继电器和信号灯,集成了一套无人船控制的水样采集设备。所选用的水泵是一种可抽空气型的12V 5W无刷电动水泵,最大抽水流量为1L/min。利用无人船主控系统控制水样采集时间和电机转速,实现对水样采集容量的控制。在无人船水样采集过程,使用岸基控制单元向无人船发送需要采样的GPS位置,无人船自动到达该位置并停船,然后发送水样采集命令,信号灯亮起,完成水样采集任务后,水泵停止,信号灯熄灭。无人船及水样采集如图1所示。

图1无人船及水样采集
二、实验及分析
⒈无人船水样采集
为验证无人船水样采集性能,于2015年7月15至17日在青岛棘洪滩水库进行了无人船水样采集实验。该水库作为引黄济调蓄水库,是一个人工修建的八边形水库,水库周长14km,水深大约10m。由于库区内无船舶,青岛市环境监测中心站每月例行水样采集只能在出水口和入水口进行,无法获取湖区内水样。在2015年7月15日实验过程中,无人船从水库南面的斜坡放下,设置了第一个水样采集GPS位点(36°20′36.32″N,120°12′29.06″E),离岸约50m,完水样采集后,设置了第二个水样采集GPS位点(36°21′16.93″N,120°12′31.04″E),离岸约1300m。实验中,水样采集瓶使用空矿泉水瓶,约500mL,采样时间约为45s。在两次定点采样中,位点跟踪精度均设置为6m,即无人船自动到达所设置的采样点周围6m范围内自动停船。
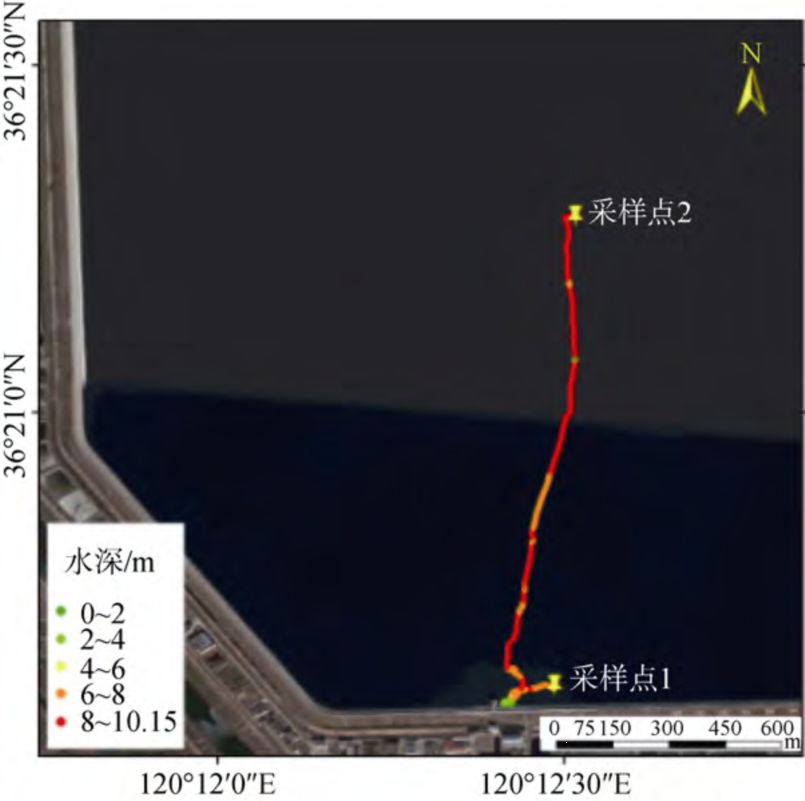
图2两次水样采集无人船轨迹
图2给出了两次水样采集的无人船航行轨迹,基本上可以直接到达采样位点,而且均成功完成了水样采集,然后带回实验室进行水样分析。在上述两个位点的水样采集中,使用了无人船的位点跟踪。为了验证无人船的长距离的自动采样能力,7月17日进行了无人船直线自动跟踪实验,无人船航行轨迹见图3,轨迹总长约4.3km。
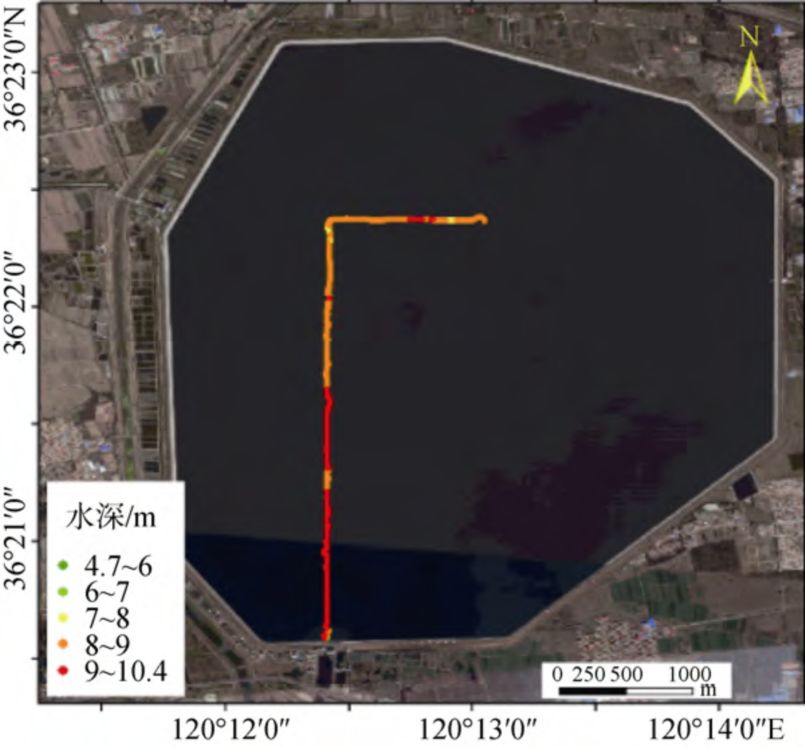
图3长距离直线自动追踪轨迹
在图4和图5中,分别给出了无人船搭载的小型气象仪获取的典型的风速、风向、气温的连续测量数据。
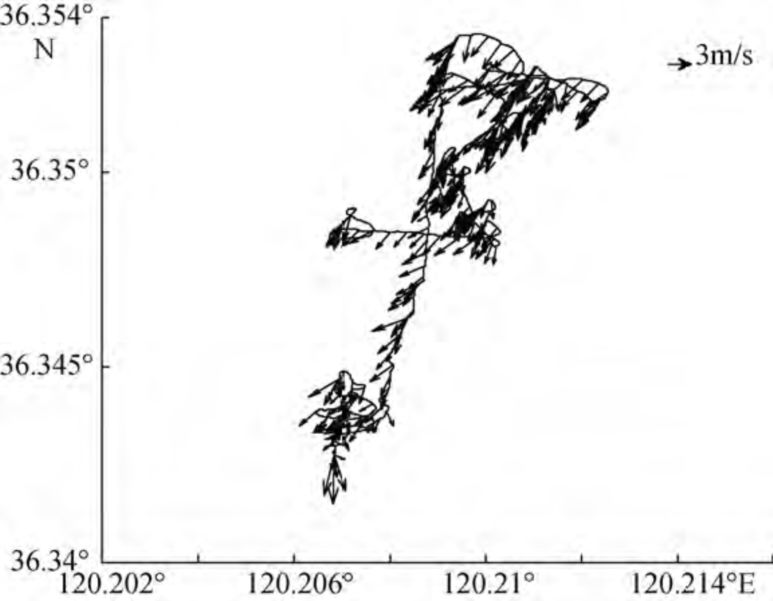
图4无人船实测风速-风向
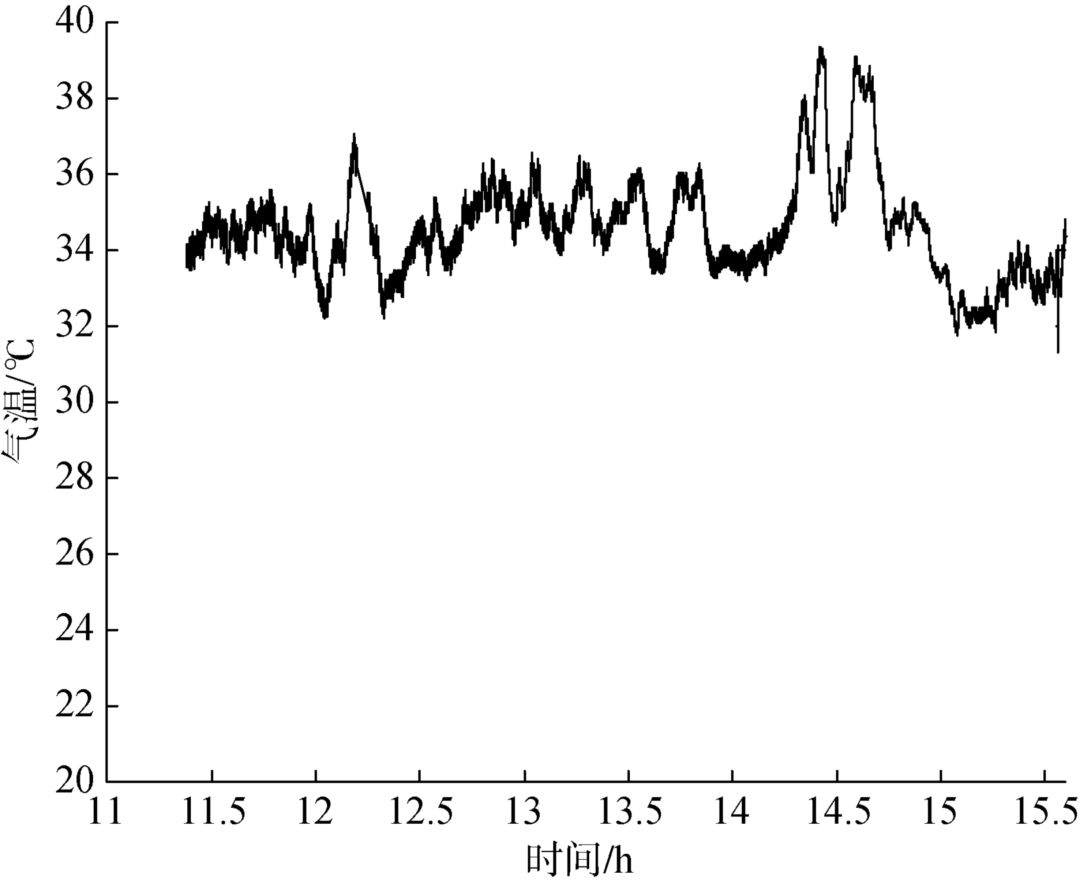
图5无人船实测气温变化
⒉水样实验室分析
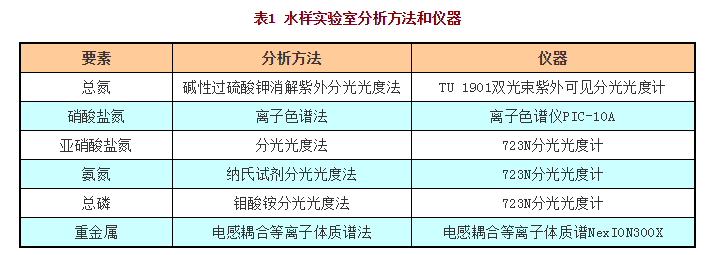
在完成无人船采水样实验后,将所采集的两瓶500mL水样带回实验室,参照《水和废水监测分析方法》(第四版),进行水质分析,所使用的分析方法及仪器见表1。
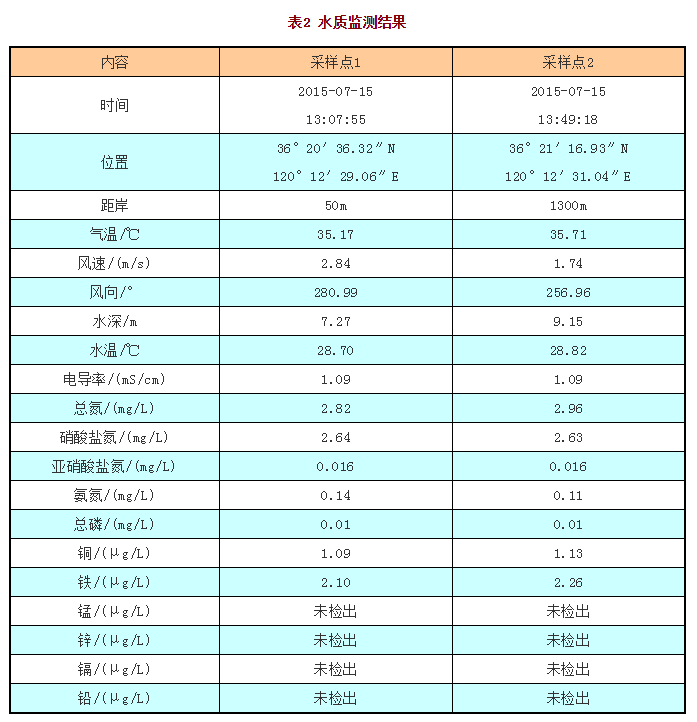
在实验过程中,利用无人船搭载的小型气象仪、测深仪和CTD(温度、深度、电导率测量仪),同步测量了两个采样点的环境数据。综合实验室水样分析结果,表2给出了棘洪滩水库无人船水样水质监测结果。
三、结语与讨论
利用自研发的无人船系统,设计集成了水样采集设备,在青岛棘洪滩水库开展了水样采集应用实验。实验结果表明,利用无人船采集的水样,完成水样实验室分析后,能够有效地监测水库水质。水样采集无人船为水库水样离岸采集及监测提供一种新颖的技术手段。未来该手段可应用于近海水样采集,降低作业成本和风险。

相关资讯
更多- 纵横股份自研吨级无人机“云龙-1P”首飞圆满成功
- 第十五届中国航展 | 云洲智能无人艇编队上演“激浪追击”
- 云洲智能救生装备亮相2024全国首届水域救援综合技能公开赛
- 巴黎奥运会水上开幕式惊现无人艇!你认出来了吗
- 广州沥心沙大桥被撞 云洲智能无人船参与现场救援
- 共筑AI新生态 赋能海洋新科技 | 吉影科技荣获“2023年度人工智能高质量发展行业创新活力奖”
- 响应“一带一路”共建 助力“中国智造”走向全世界 | 吉影科技精彩亮相美国-2024国际消费电子展CES!
- 2022全球无人系统大会完美谢幕 云洲智能参与定义行业未来
- 湖南广电打造科技文旅典范 云洲文旅无人船亮相首届岳阳市旅游发展大会开幕式
- 云洲智能成为CTDU中旅联合作伙伴 共绘“科技+文旅”新蓝图