水下机器人在救捞中的应用初探
转载 2018-04-13 09:23 深之蓝 来源: 天津深之蓝
水下机器人是水下无人潜水器的总称,主要分为有缆水下机器人(ROV)和无缆水下机器人(AUV)两类,其中由于ROV占据水下无人潜器的绝大多数,所以通常情况下水下机器人也泛指有缆水下机器人,即ROV。ROV因为可实时响应、扩展性强、减少潜水员下水危险性等特点,使得其显示了很大的水下工作潜力。随着产品技术和质量的不断提升,目前ROV已经广泛用于海洋石油、水下检测、搜救打捞等方面。打捞搜救是一项极为复杂的工程,涉及的领域极多。其中ROV主要工作就是代替潜水员在水下进行水下搜索、视频观测和打捞救助辅助等工作。
水下机器人发展及救捞中应用
水下机器人的研制可以追溯到20世纪中期,而真正引起轰动是1966年,一台名为“CURV-1”的ROV和载人潜水器配合,成功在西班牙外海找到并打捞了失落在海底的氢弹,从而水下机器人开始受到了关注。这台水下机器人是美国1960年研制,专门用于水下打捞的机器人,这台机器人还在1973年在爱尔兰成功救援了一搜失事潜艇中的驾驶员。
目前有很多国家和救援组织都采用ROV进行救助打捞工作,尤其是深水的救助打捞作业。美国Oceaneering公司就是这其中最成功的一家,他们自主研发并使用多款水下机器人,并配有相应的辅助系统,作业水域遍布世界各地。在近些年的几百起搜寻和勘察作业中,完成成功率近90%,并且创造了最大水深5425m的世界打捞记录。
在国内救捞方面,救助打捞局也已经配备了多台3000-6000m的ROV,并且已经在多次大型救捞项目中成功应用,但目前无论是ROV使用率或成功完成率方面都于国外有一定差距,尤其浅水救捞还主要依托潜水员为主。
设备和传感器推荐
01.缆控水下机器人(ROV)
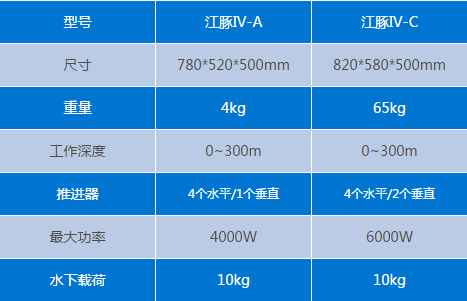
江豚IV水下机器人是全新一代小型缆控水下机器人,也是“豚”系列产品中的主打产品,它汇集了深之蓝多年来的研发设计精粹。江豚IV分为A型和C型两个版本,C型是基于标准江豚IV-A型开发的一款强化版产品,相比标准江豚IV具备更强的机动性能。

图 - 江豚IV-C
江豚IV-C型采用4个水平矢量推进器和2个垂直推进器设计,其中4个水平推进器采用2正2反的安装模式,从而增强ROV的横移能力,使得江豚IV在水下具备更强的环境适应性。江豚IV-C型采用的TG166A推进器是我司自主研发的明星专利产品,每个推进器可以提供高达18kg的强劲推力,相比于国外同级别产品,TG166A所有关键指标都已经领先,质量优异可靠。
江豚标配一个高清彩色摄像头,该相机采用SONY高性能的CMOS传感器,具备4倍光学变焦功能,相机分辨率高达1920*1080,感光度可达0.001Lux。同时配备3个照明灯,其中两个固定在框架上,另外一个安装在云台上跟踪摄像头同步运动。每只光源可提供4000Lm的照度,光源可实现无级控制调节。出色的摄像照明系统硬件保证了机器人在水下成像的优异表现。

图-深之蓝江豚机器人搜索坠入四川大渡河水中车辆
02.旁扫声纳或AUV
旁扫声纳又称为侧扫声纳,通过两侧的换能器各向海底发射一条波束,通过接收回波信号的强度呈现海底的二维图像。旁扫声纳可以选择拖鱼搭载,采用母船拖拽形式工作,也可以通过集成在AUV上进行自主测量

图 – 旁扫声纳

图 – 橙鲨AUV
橙鲨I型AUV是由天津深之蓝海洋设备科技有限公司设计、生产,优选先进的成熟零部件产品为主,具有低阻力外形以及良好的低速操纵性,流体动力布局的类型为“航行体+十字型全动鳍舵+单转桨”的形式。水平鳍舵左右对称,垂直鳍舵上下对称。应用“GPS+光纤罗经+DVL”方案实现自主导航,可搭载侧扫声纳等传感器,实现对海底地形的观测。

03.扫描声呐
扫描声纳是通过换能器发射一条垂直扇形波束,然后通过机械转动扫描扇形或圆形区域成像。扫描声纳通常安装在ROV上,它相当于飞机上的雷达,用于ROV远距离搜索的补充。但机械扫描声纳对搭载平台稳定性要求较高,所以通常需要ROV坐底稳定后,进行扫描,完成整幅图像扫描后才能继续ROV操作

图 – 扫描声纳图像
04.多波束图像声纳
多波束图像声纳是在一定角度范围内有很多波束同时工作,能够在改固定角度内实时高分辨率成像。通常多用于ROV的实时导航和避障,以及在浑浊水域的目标探测、识别和区域内的检查。相比于扫描声纳,多波束声纳实时性更好,可以随时观测水下情况。
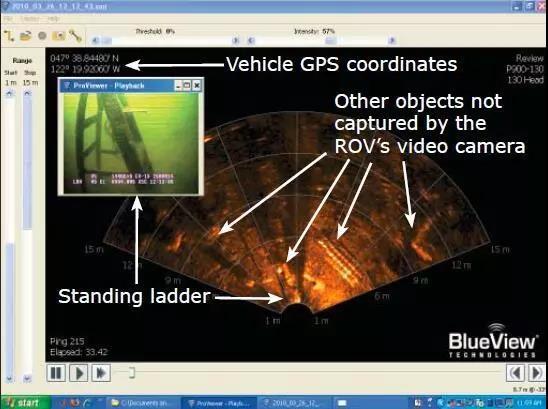
图 – 多波束声纳图
由于工作方式和成像结果的不同,单波束扫描声纳通常是用于定点范围目标搜索,而多波束图像声纳更适合实时的观测。如上图所示,在摄像头的视野范围内仅能看到最近处的梯子,但是却无法看到更远处的目标物。这时多波束成像声纳就可以有效的补充,发现ROV前方更多的疑似目标物信息。
05.水下定位系统
由于GPS信号在水下不能传输,水下机器人一般选用超短基线水下定位系统确定水下潜器的相对位置和运动轨迹。超短基线也叫做USBL,分为收发机阵和应答器两部分,应答器安装在ROV上,收发机阵从岸上或船上放入水下。收发机阵发射信号到应答器,并接收应答器的回馈信号,利用各个阵元之间的相位差(或者时延差)来测量目标的方位,从而计算出ROV在水下相对收发机阵的位置。再结合ROV内置的罗经和水面上的GPS等系统,即可获得ROV的绝对坐标位置。
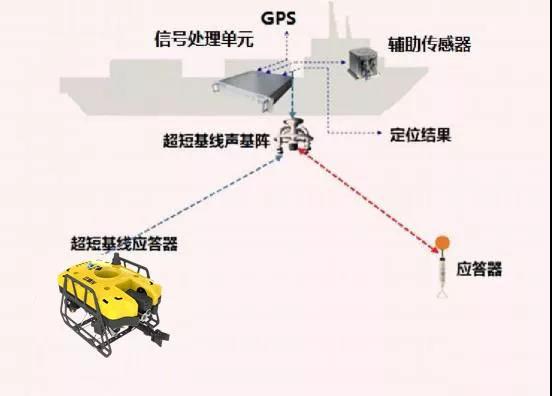
图 - 水声定位系统工作示意图
06.机械手等辅助工具
为了方便水下进行样品的采集,可以根据情况为ROV选择搭载了机械手或者其他辅助工具,用于水下的抓取、剪切和取样等工作。

图 - 江豚IV-A

图 - 扩展五功能机械手
水下救捞工作流程案例分析
2017年9月6日,河北唐山潘家口水库,GUE两名潜水员在水下长城探索项目中失联。深之蓝联合全国多支救援队、企业进行搜救工作。事故12天后,深之蓝江豚IV型缆控水下机器人(ROV)成功在水下找到两名失联潜水员。本文将结合本次搜救简述水下救捞的工作流程。
1.首先确定需要搜索的范围。如果搜索范围过大(建议不超过100m*100m),先制定测线,通过旁扫声纳或AUV对整片目标区域进行水下声学扫描,对于水底环境复杂的区域,也可以采用船载多波束等方式进行水下扫描。当在声纳图像中发现疑似目标后,对疑似目标的坐标进行标记。
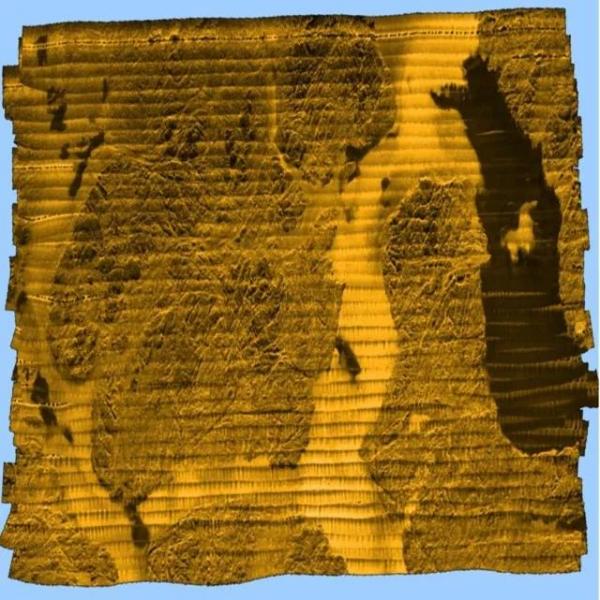
图 – 旁扫声纳后处理图像
潘家口水库位于河北唐山迁西县洒河桥镇,最大面积达72平方公里,水库总容量29.3亿立方米,库区水面105,000亩,最深处达80米。1975年作为华北地区最大的水利枢纽工程开始建设,1982年竣工。
由于潘家口水库水下地形复杂,有淹没的村庄和渔民布置的渔网等。这种环境下旁扫声纳或AUV设备很难使用,最终采用多波束设备对可疑区域进行扫描。
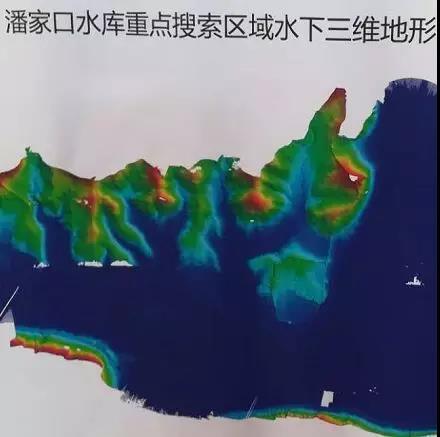
图 – 潘家口重点区域扫描图(该图片来自劳雷公司)
通过对于可疑区域扫描图像的分析,得到了部分疑似点
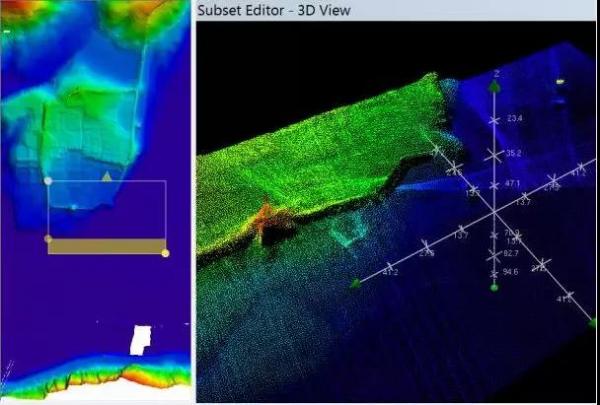
图 – 锁定疑似目标点(该图片来自劳雷公司)
2. 当发现疑似目标点后,ROV搭载定位和声纳传感器在疑似目标区域下水,通过声纳对这个区域进行扫描,获得疑似目标物的相对位置后,调整ROV靠近目标物。
本次搜救使用的设备是深之蓝公司的江豚IV-A型水下机器人,搭载了M900多波束前视声呐、超短基线水下定位系统和两功能的机械手。

图 – 江豚IV-A型配置
ROV下水后在疑似目标区域进行往复式搜索,通过超短基线确认ROV的行进路线。由于水下能见度较差,主要通过M900声纳对ROV周围进行实时探测。每次ROV转向到下一条搜索路线时,要保证声纳可以部分覆盖上一次路线的区域,确保不会有遗漏的区域。
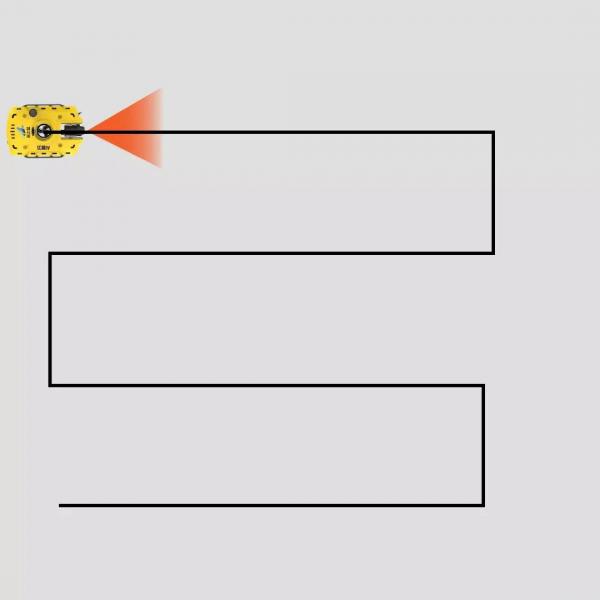
图 – ROV搜索路线图
经过不断搜索,深之蓝的搜救队员终于在17日17时左右,从声纳图像中发现了疑似目标。

图 – 疑似目标
3. 通过摄像头直接观察确认目标物情况。如果水质比较浑浊的情况,建议加载多波束图像声纳,通过多波束图像弥补摄像头的可视范围。
保证疑似目标一直保持在声纳图像中,通过控制ROV不断靠近目标。最终目标出现在摄像头图像中,确认为目标潜水员。
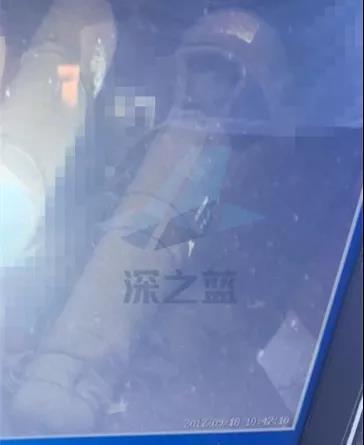
图 – 确认目标
找到第一个搜救目标后,不久后又在附近找到了第二个搜救目标,本次搜救任务的目标潜水员全部被找到。
4. 确认目标物后,可以通过USBL和GPS计算出ROV当前的GPS坐标,方便为打捞做准备;如果物体不大,也可以通过机械手直接抓取带回到岸上。
ROV在救捞行业的前景和趋势
ROV目前已经成为搜救打捞中不可或缺的力量,它可以代替人在搜救打捞过程中完成很多水下工作,比如穿引钢丝、水下清障、切割取样等。尤其在深水环境和危险环境,ROV的使用会极大的减少人员损伤风险。国际沉船打捞中ROV都发挥了重要的作用,也证明了ROV在搜救打捞领域的广阔前景。但是目前ROV在我国很多搜救打捞工作中并没有得到广泛应用,主要有以下原因:
1 水下机器人的成本相对偏高,尤其随着搜救打捞任务的复杂性,设备成本会成几何形上涨。
2 ROV的操作员需要具备丰富的经验,需要熟悉设备和传感器,同时需要具备海洋物理、空间几何等方面知识和良好的心理素质;
3. ROV目前技术已经逐渐成熟,但是水下环境复杂多变,水流、能见度等因素都会影响到水下机器人操作。
加强水下机器人的应用推广培训,扩展水下机器人的搭载能力、降低水下机器人操作难度,能够更好的使水下机器人服务于救捞行业。智能技术的不断发展,未来水下机器人也可以通过引入智能技术,自主判定水下的工作。