VERTEX AUV 自主水下集群机器人

产品详情
产品参数
产品图片
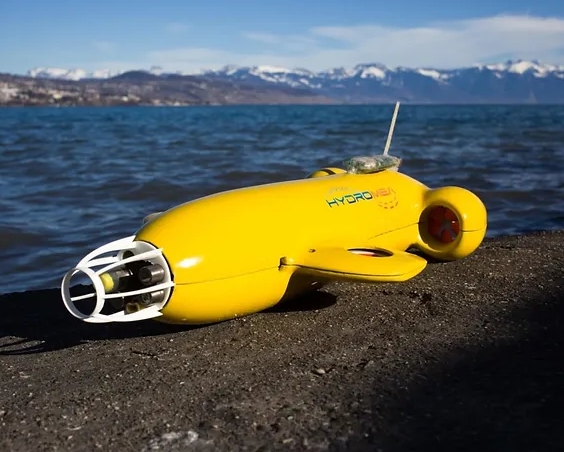
VERTEX AUV 从一开始就专门为可扩展性而设计:可以以可承受的成本进行批量生产,体积小、重量轻,易于大量部署,并配备了一系列新颖的通信和定位技术,可以作为一个团队进行合作。
电子和机械部件是高度模块化的。这使我们能够快速更换或升级组件,使电气接口和重量平衡适应新的有效负载传感器,并根据要求轻松调整每个任务的配置。默认传感器有效负载是 YSI 的 EXO2 系统,该系统也非常模块化 - 7 个端口可以加载 EXO2 系列中的任何可用传感器,以满足每个部署的要求。通过调整我们的可更换有效负载前板,可以根据要求集成替代传感器。
我们开发了一种专为机器人群设计的独特低频无线电系统,该系统将水下机器人连接为多跳无线电网络。先进的分布式调度算法可防止干扰并最大限度地提高通信吞吐量。此外,我们还添加了一种新颖的分布式声学定位系统,允许每个 AUV 相对于舰队中的其他 AUV 进行三角测量。通过将该系统与通信网络和 GPS 接收器相结合,每当任何 AUV 到达水面时,GPS 接收器都会获取位置,每个机器人都可以获得连续的位置信息 - 无需额外的基础设施。AUV 还配备了用于水面通信的无线电和 3G。可扩展通信和定位技术的独特组合使我们能够实现复杂的集群和编队控制算法。通过团队合作,我们的潜艇舰队可以对测量的梯度做出适应性响应,例如找到泄漏源或跟踪羽流以确定其大小。
VERTEX AUV 配备了 5 个我们专有的专利推进器,使其灵活且高度机动。凭借三个稳定推进器和两个前推进器,潜艇可以绕 3 个轴自由旋转,即使在静止时也能保持深度。可以以高达 1 m/秒(2 节)的速度精确跟踪任何 3D 轨迹。我们先进的导航自动驾驶仪自动引导潜艇到达预先通过任务规划软件上传的预定义航路点(GPS 位置和深度
Vertex 可以配备多种微型电子设备来收集数据,无论是用于视频和图像的相机、用于测深研究的声纳还是用于环境测量的传感器。