思展科技 水下自主式无缆机器人(AUV)
品牌:思展科技

产品详情
产品参数
产品图片
典型应用

水文调查
环境水质监测
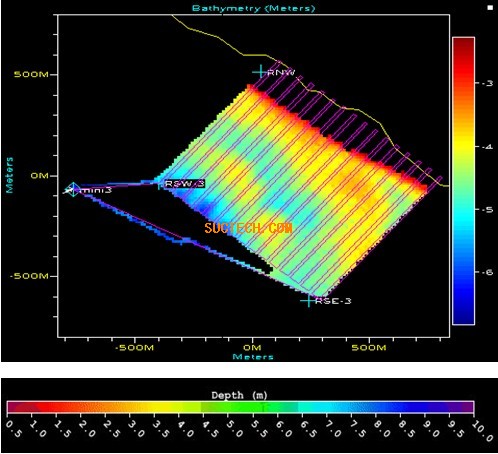
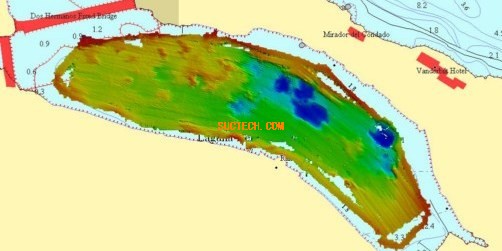
水深图、海床图绘制
水下爆炸物探测操作
港口安检
海事碎片绘图
搜寻和救助作业
渔业作业
科学采样和绘图
RMS系列小型水下航行器

RMS系列产品是一个革命性创新设计的水下无缆无人航行机器人,具有体积小、重量轻、运行可靠而且操作维护简单方便的优点。我们的无人无缆水下机器人是设计用于在水深100米~600米以内的湖泊、近海岸或远海中使用的,特别适合于长距离多区域的水下巡航以及有缆机器人不方便工作的场合如狭窄和恶劣的水下环境,它可以完全独立无束缚的进行水下航行和探测。
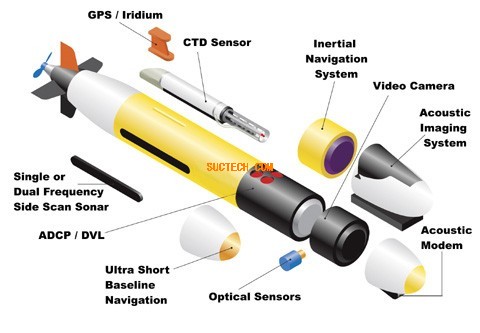
我们的机器人采用独立模块化设计和不同一般的非抗压壳体设计,机器人壳体内从推进器、动力电池、航行控制单元到各种电子声纳、深度计、高度计、DVL、导航仪等仪器和水下水面通讯设备都是独立防水的,并用水下接插件和水下电缆连接起来。这样的模块化独立设计特别方便用户配置各种装备负载,且便于维护和运输。即使因为航行中出现意外导致壳体进水也不会危及内部器件的正常工作,这对于复杂恶劣的水下环境来说尤为重要。
用户可以根据具体任务要求配置系统的电子罗经、惯量导航仪、多普勒流速计、水下换能器、水下摄像机、水下照相机、水声调制解调器、水声转发器、GPS接收器、铱星通讯单元、Wi-Fi通讯模块、样本采集器和各种机械手臂手爪等装备,以实现不同的工作目的。
该水下机器人还配置了简单好用的GUI矢量图操作界面,很容易的实现装备维护、检测、任务计划、数据分析等工作。它配置了VIP航行界面程序,可以很方便地通过控制器同时编程和控制4个RMS。
如采用经济的惯量导航单元、电子磁罗经外加GPS定位就可以完成基本的水下巡航任务,利用间歇性水面GPS定位和电子罗经校准结合先进的水下惯量推测算法,其位置漂移度可以达到0.5%以内。如再加上后期的航迹修正处理,其定位误差可缩小到0.2%以内。这种方案特别适合于自航行机器人的一般水下巡航探测和科研任务。
如增加水下超短基线定位、水声换能器、水声调制解调器、水面通讯转发器和GPS等辅助设备就可以实时跟踪该机器人的水下位置,实时掌握机器人的状态并监控和记录其回传的数据,包括各种水下探测仪器采集的数据,并可在航行过程中调整修改所执行的任务和巡航点或航迹,但其成本也相对会增加很多。机器人在1000m深度时,定位精度10m以内,如辅以多普勒流速计锁定还可提高其定位精度到2m。
我们的机器人具有完善的保护功能,配置接地故障、进水和低电压检测,所有传感器具有状态良好或故障指示。
在过去的几年中,RMS成功地航行了数万小时,完成了大量水下任务,它被证明是目前世界上质量最好、最为可靠的无人独立航行水下机器人之一。
特点
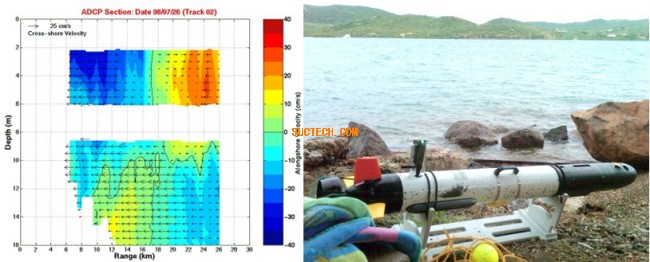
体积小重量轻:碳纤维壳体,不到20kg的重量,非常便于运输储存、部署下水和打捞出水作业。
久经考验的可靠性:十多年的产品开发和现场作业超过数万小时。

操作方便:直观的图形化用户界面,任何人只需几个小时的训练即可成为一个水下机器人操作者。
部署快捷:熟练后只需要几分钟即可单人将机器人放入水中并遥控启航开始执行任务。
通讯便捷:机器人在水中就可以通过水下调制解调器、无线电、铱星通讯或无线Wi-Fi下达任务并进行数据传送,无需回收机器人。
一致性:优秀的设计和制造工艺,使得每个水下机器人符合高度一致和严格的质量标准。
尾鳍大小可选,且可以自由地快速更换,提高了装备的灵活性和维护的便捷性。
安全性:可配装紧急上浮自充气袋,在需要或失控时浮起,确保设备和数据安全回收。
控制软件和界面
RMS系列水下机器人配套提供简单易用的GUI界面,方便的实现航行器的维护、检测、任务规划、数据分析等工作。用户可以通过标准的以太网接口或串行接口将它和计算机(或笔记本电脑)相连,通过VIP接口程序可以方便的进行任务计划和程序编制。
集成了一个文本编辑器,简单的构建出任务文件
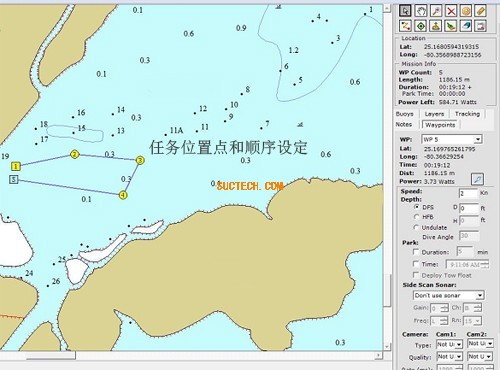
以地图方式显示设定好的任务
直接设定位置点和航行顺序,鼠标点击和拖动即可轻松实现任务计划
自动全面检查已设定好任务的错误,如果任务参数不正确,马上显示报警信息
检查好任务无误后即可下载到机器人后开始执行
有一组醒目的指示灯显示危急的系统状态,绿色代表OK,黄色表示非紧急的故障,红色表示有危急的故障
多页的文本窗口显示系统内部的详细信息


在工作任务期间,水下机器人首先通过系统中的水声转发器、装有水声调制解调器、GPS接受器和无线数据转发器的水面浮标中继站与水面母船或岸边的控制主机通讯,它将实时传送出水下机器人当前的状态信息,让控制人员及时了解其位置和各项工作状况参数,并可以修正计划下达命令控制水下机器人来执行相应的任务。当机器人无法和主机通讯时,则其内部计算机会纪录所有工作状态的数据,并存贮在其内部的硬盘上,任务结束后,需要恢复时将这些文件上传载入回放。这样操作者就可以看到航行器航行中的所有状态数据,就好像还在执行任务期间一样。这就快速的提供了刚执行任务的质量检查,也对培训和故障查找特别有用。输出数据格式为ASCII文本或者Matlab格式,其中包括位置、深度、高度、时间和其它预设需要采集的数据,以便于后期分析处理。
技术参数/功能
| 型号 | RMS-100S | RMS-100 | RMS-200 | RMS-600 |
|
|

|
|

|

|
| 直径 | 14.7cm | 19cm | 24cm | 33cm |
| 长度 | 127cm | 160cm | 175cm | 325cm |
| 空气中重量 | 19kg | 37kg | 61kg | 240kg |
| 标准潜深 | 100m | 200m | 600m | |
| 内置电池容量 | 0.6 KW-Hr 可充电锂电池 | 1 KW-Hr 可充电锂电池 | 1.5 KW-Hr 可充电锂电池 | 5.2 KW-Hr 可充电锂电池 |
| 续航能力 | 14小时,以1.3 m/s(2.5节)速度航行 | 10小时,以1.5 m/s(3节)速度航行 | 12小时,以1.5 m/s(3节)速度航行 | 70小时,以1.5 m/s(3节)速度航行 |
| 推进器 | 直流无刷电机直接驱动外罩式三叶螺旋桨 | 直流无刷电机直接驱动开放式三叶螺旋桨 | 直流无刷电机万向三叶螺旋桨 | 直流无刷电机直接驱动开放式两叶螺旋桨 |
| 速度范囲 | 最大2 m/s (4节),速度可调 | 最大2.3 m/s (4.5节),速度可调 | ||
| 航行控制 | 三套独立鳍控制航向、俯仰和横滚;鳍片大小可选 | 两套耦合鳍控制航向和俯仰 | 无舵鳍设计,推进器外罩万向控制航向和俯仰 | 三套独立鳍控制航向、俯仰和横滚;垂直深度控制;航线跟踪控制;前端选装辅助鳍 |
| 导航 | 惯性导航,航迹推算,DVL,GPS | 长基线 (LBL);超短基线 (USBL);多普勒辅助航迹推算 | 惯性导航,DVL,GPS,罗经,CT | 惯性DVL导航,长基线声波,WAAS GPS,P码GPS |
| 声波通讯 | 声波调制解调器 | |||
| 以太网通讯 | 无线Wi-Fi | 有线LAN | 有线LAN,RF无线电 | 无线Wi-Fi |
| 标准传感器 | 深度计,高度计,电子罗盘,进水传感器 |
ADCP多普勒海流剖面仪/多普勒速度仪(DVL) 侧扫声纳 导航数据:长基线 (LBL) 压力、电导率和温度传感器 |
惯性导航单元,电子罗盘,DVL多普勒流速计,侧扫声纳,温度传感器,深度计 | ADCP多普勒海流剖面仪,惯性导航单元,GPS,侧扫声纳,压力、电导率和温度传感器 |
| 选装传感器 |
双频侧扫声纳 多波束声纳 ADCP多普勒海流剖面仪 铱星调制解调器 视频摄像机/照相机 无线LAN 声波调制解调器 无线电900MHz 电导率和温度传感器 其它根据需要可定制装备 |
超短基线导航 (USBL) 惯性导航系统 双频侧扫声纳 水声调制解调器 GPS 铱星调制解调器 视频摄像机/照相机 荧光计,光散射,浊度传感器 其它根据需要可定制装备 |
超短基线导航 (USBL) 水声换能器 水声调制解调器 GPS 铱星调制解调器 双频侧扫声纳 视频摄像机/照相机 荧光计,多束声纳,浊度传感器 其它根据需要可定制装备 |
超短基线导航 (USBL) 水声换能器 水声调制解调器 双频侧扫声纳 铱星调制解调器 视频摄像机/照相机 荧光计,多束声纳,浊度传感器 其它根据需要可定制装备 |
| 软件 | GUI编程界面, 培训, 任务后分析, 文件, 维护, 故障处理 | |||
| 数据输出报告 | HTML报告生成器,直接用Matlab和ASCII文本导出 | |||
| 系统选装 | 可编程控制的紧急上浮充气袋,内置声波发射器 |
多机器人工作能力(可允许4个RMS机器人同时工作) 路由网关通讯浮标 |
||
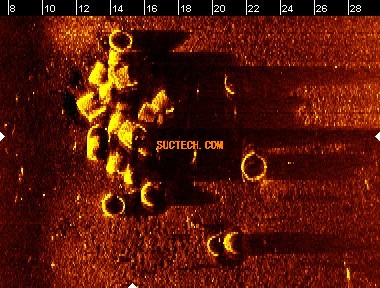
系统结构和配置 侧扫声纳成像图
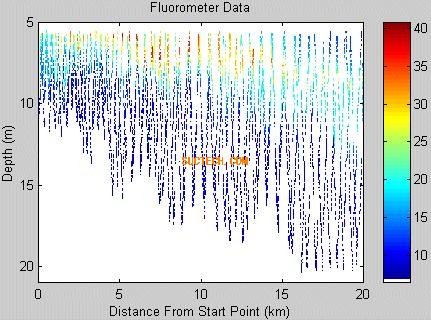
荧光计数据显示图 ADCP水声多普勒流速剖面仪数据
深度计数据显示图 可配置选装各种水下传感器