GIST 研究人员教机器人识别部分隐藏的物体
原创 2022-04-24 11:24 优优 来源:中国AGV网
资料来源:光州科学与技术学院
韩国光州科技学院(GIST)的一个研究小组创造了一种方法,使人工智能(AI)视觉系统能够更好地识别那些杂乱无章地放在一起、可能不完全可见的物体。
GIST的副教授Kyoobin Lee和博士生Seunghyeok Back以及他们在该大学的研究团队,着手创建一个能够识别和分类杂乱场景中物体的人工智能系统。该团队很快发现,机器人视觉系统需要大量的物体数据集,以便能够识别不完全可见的物体。
Back说:"我们期望机器人能够识别和操纵它们以前没有遇到过的或被训练过的物体,然而,在现实中,我们需要一个一个地手动收集和标记数据,因为深度神经网络的泛化能力高度依赖于训练数据集的质量和数量。"
通常情况下,当人工智能遇到一个由许多杂乱的物体组成的场景时,系统会尝试仅根据其可见的部分来识别每个项目。Lee和Back决定采取不同的方法,而是教人工智能识别每个物体的几何形状,这样它就能推断出它看不到的物体的哪些部分。
教会人工智能这样做需要一个更小的数据集,即包含深度信息的45,000张照片的现实合成图像。当人工智能看到一个场景时,它开始通过挑选出感兴趣的物体来理解它,然后将该物体分割成一个 "可见掩码 "和一个 "调和掩码"。
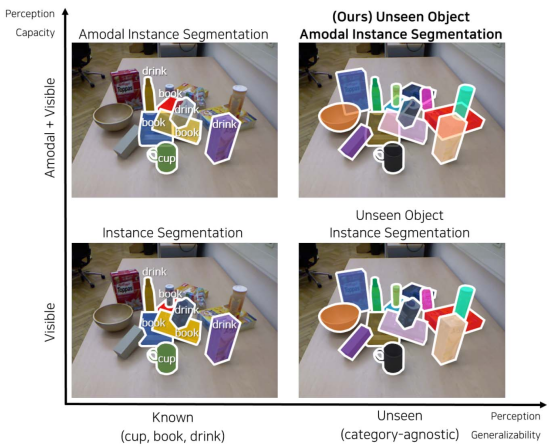
比较现有的方法和研究者识别部分被遮挡物体的方法。|来源:光州科技学院
在对场景进行分割后,人工智能使用了一个分层遮挡建模(HOM)方案。该方案将可能被遮挡的特征组合按其可能存在的程度进行排序。该团队针对三个基准测试了其HOM方案,发现它达到了最先进的性能。
Back说:"以前的方法只限于检测特定类型的物体,或者只检测可见区域而不明确推理被遮挡的区域。相比之下,我们的方法可以像人类视觉系统一样推断出被遮挡物体的隐藏区域。这能够减少数据收集工作,同时提高复杂环境下的性能。"
该研究小组的成果在2022年IEEE国际机器人和自动化会议上被接受。