日本早稻田大学开发移动式码垛机器人
原创 2022-04-13 10:05 南山 来源:中国AGV网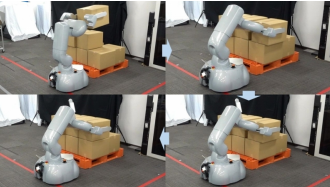
来自日本早稻田大学的机器人风险投资公司东京机器人公司(东京都新宿区社长坂本佳弘)在上个月(3月6日)宣布,其物流机器人“Mobile Gripper”的商业原型已开发完成。
移动抓手是一种具有运行功能的码垛/卸垛机器人。您可以举起和搬运箱子等行李,并将它们堆放在托盘(装载平台)上。通过组合弯曲轴和升降轴,可以从接近地面的高度接近约 160 厘米的高度。箱体是通过左右夹入来提升的,但放置后推箱体的操作可以使货物没有任何间隙地装载。
目前,我们正在寻找合作伙伴,将在分销现场进行演示实验。
这个原型沿着地板上的线标记移动,但一种可以在没有标记的情况下自主移动的 SLAM 移动类型也在开发中。