AR帮助研究人员将机械臂扭曲成形状
原创 2022-03-08 10:25 优优 来源:中国AGV网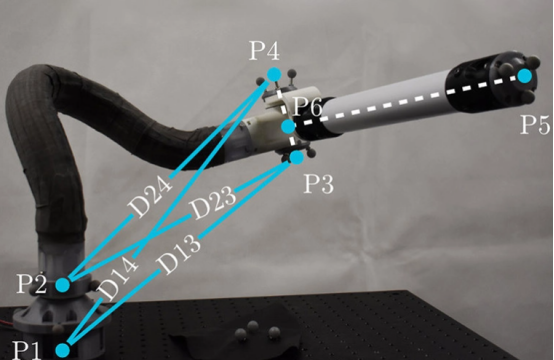
胳膊从P6-P5是刚性的,在P6有一个关节,胳膊的下部是可塑的。|来源:伦敦帝国学院:伦敦帝国学院
伦敦帝国学院的研究人员创造了一个可塑性强的机器人手臂。该手臂可以通过混合现实智能眼镜和运动跟踪摄像机手动引导成形,以确保精确定位。
许多机器人手臂都有牢固的关节和肢体,以确保强度,但研究人员希望创造一种足够灵活的手臂,以用于多种应用。
该手臂是用几层滑溜溜的麦拉片制成的,它们相互滑动,当手臂处于正确的位置时,可以被锁定在原位。用户能够使用增强现实(AR)护目镜看到模板,它将正确的定位叠加到用户环境中。当手臂处于正确的位置时,模板会变成绿色。

胳膊的绿色轮廓显示了它应该被定位的位置。|来源:伦敦帝国学院
与更传统的机器人手臂相比,该手臂有几个优势。首先,它很轻,这使它成为太空旅行的理想选择,因为在太空中每一磅都很重要。它也很温和,所以它可以在受伤康复中作为一个额外的手使用。研究人员还希望这种手臂能在制造、车辆和建筑维护中发挥作用。
研究人员决定使用AR来指导手臂的操作,以便让不熟悉机器人技术的人也能做到这一点。他们在五名年龄在20-26岁的男子身上测试了该系统,他们有机器人的经验,但没有操纵可塑性机器人的经验。他们每个人都能够将手臂移动到正确的位置。
研究人员,戴森设计工程学院的尼古拉斯-罗哈斯博士和博士研究员安格斯-克拉克,以及计算机系的博士研究员亚历克斯-兰恩,在IEEE机器人和自动化杂志上发表了他们的成果。
下一步,研究人员将在AR中加入触摸和音频元素,以提高机器人定位的准确性。他们也有兴趣加强机器人,使它们在锁定位置时更加坚硬。