优化机器人辅助喂养系统的效率和舒适度的框架
原创 2022-01-18 10:31 优优 来源:中国AGV网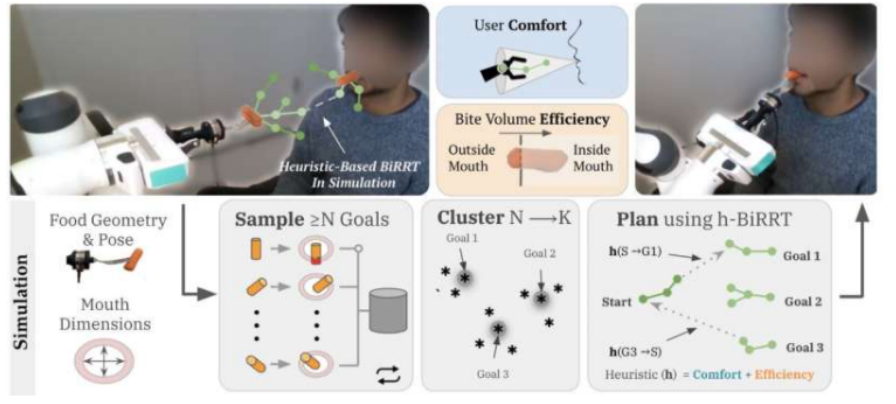
该团队的方法在模拟中找到可行的咬合转移轨迹。考虑到食物的几何形状和叉子上的姿势,我们至少抽取N个目标食物姿势,使用学习到的约束模型检查这些姿势与口腔几何形状的碰撞情况。接下来,我们对目标姿势进行分组,并使用启发式指导的BiRRT来达到具有舒适性(蓝色)和咬合量效率(橙色)启发式的分组中心。资料来源:Belkhale等人。
机器人可以成为老年人和身体残疾者的宝贵盟友,因为它们可以协助他们的日常生活,减少他们对人类照顾者的依赖。一种可能特别有帮助的机器人系统是辅助喂食或咬合转移机器人,它们被设计用来从盘子里拿起食物,给无法移动手臂或协调动作的人喂食。
虽然世界各地的许多研究团队都试图开发机器人辅助喂食系统,但大多数现有的解决方案并没有考虑用户在从机器人那里接受一口食物时的舒适感。换句话说,这些系统可以有效地抓取和传送不同形状和大小的食物,但它们没有考虑用户将如何接受这一口,例如,机器人在传送这一口时是否会用叉子倒戳用户的脸或嘴。
斯坦福大学、华盛顿大学和康奈尔大学的研究人员最近开发了一个新的框架,试图在机器人辅助喂食系统的效率和舒适度之间实现最佳平衡。他们的方法,在一篇预先发表在arXiv上的论文中介绍,是基于一种被称为 "启发式指导的双向快速探索随机树(h-BiRRT)"的计算方法。
进行这项研究的研究人员之一Ethan K. Gordon告诉TechXplore:"我们以前在这个领域的很多工作都集中在只是从盘子里拿起食物的问题上,基本上,机器人会把食物送到嘴边,然后就可以了。然而,在正式和非正式的演示中,新用户几乎总是会对这种方法表示不舒服。这是一把叉子,一个锋利的器具,所以这种不适是可以理解的。”
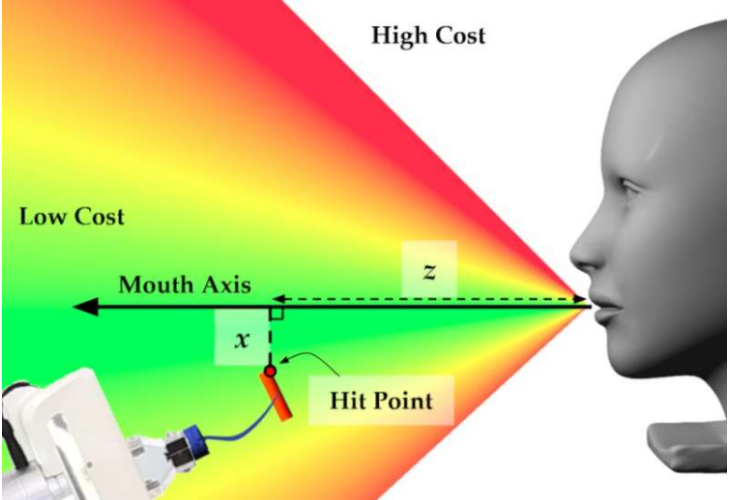
空间舒适度成本(红色高,绿色低)。向上的成本梯度比向下的陡峭,确保靠近脸部的轨迹具有较高的 "舒适 "成本。资料来源:Belkhale等人。
在以前的研究基础上,戈登和他的同事们开始探索是否能改善机器人喂食系统的舒适度。他们最近论文的总体目标是更好地理解用户在做试验时报告的不适感,并找到一种方法来减轻这种不适感。
他们的方法是通过在模拟中识别有希望的咬合转移轨迹来发挥作用。同时,它还考虑了食物的几何形状和叉子的姿势,以确保最大限度地减少与用户口腔的碰撞。
戈登解释说:"我们的方法直接考虑舒适度,将其与'效率'(即用户理论上能够从叉子上取下多少食物)相平衡,我们将其作为一个明确的成本启发式方法添加到我们的运动计划器中。"
该团队在一系列现实世界的评估中,使用Franka Emika Panda机器人手臂评估了他们新的机器人辅助咬合转移框架。这个系统由一个叉子组成,通过3D打印的支架连接到ATI Mini45 6轴F/T传感器。该机器人还集成了一个外部英特尔Realsense RGB-D相机。
戈登说:"值得注意的是,我们发现用户明显喜欢我们的方法所产生的转移,而不是基线方法所产生的转移,我们的研究结果意味着,一个精心设计的启发式方法可以在很大程度上使HRI系统对人类合作者更加舒适,而机器人方面的额外复杂性相对较少。"
在未来,这种新方法可以提高自动喂食系统的舒适度,促进其在医疗机构和其他现实世界环境中的部署。同时,戈登和他的同事们计划进一步发展他们的框架,例如通过使机器人在咬合转移过程中对用户的动作有更多的反应。
例如,我们计划关注这样的问题:如果用户俯身抓取食物,机器人应该如何调整轨迹?另外,我们最近的工作主要集中在胡萝卜和其他类似的、硬的、圆柱形的食物。我们肯定需要设计一个能够处理所有不同形状和粘弹性的食物的系统。
网友评论0条评论
相关资讯
更多- 航发机器人案例分享 | 8t 径向取线盘 AGV 赋能线卷搬运智能化升级
- 香港工业总会65周年:光明区率「领先科技考察团」到访劢微机器人
- 观众报名丨2025国际低空经济博览会国内观众预登记通道开启
- 专精特新“小巨人”赋能智造新生态 宇锋智能携最新一代智能搬运解决方案亮相137届广交会
- 2025年第一季度无人机行业新品全景速览
- 从"防"到"救"全覆盖!6月16-18日 2025广州应急展,一站式洞见安全应急万亿市场
- 活动报名:2025国际低空经济博览会全国巡回推介会——成都站即将召开!
- 2025第一季度低空经济行业融资动态
- 博索尼(BOLZONI)支持自动化转型
- 极客桥携全系列低空无人系统照明设备,将亮相2025国际低空经济博览会