美大学受蚂蚁启发开发四足蜂群机器人穿越复杂地形
原创 2021-12-31 15:00 DDing 来源:中国AGV网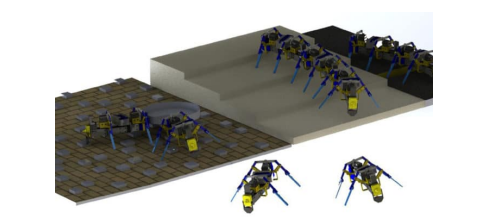
蚂蚁启发的四脚群机器人穿越复杂地形。资料来源:圣母大学
蚂蚁、蜜蜂和鸟类解决问题和克服障碍的集体行为是研究人员在空中和水下机器人技术中开发的。这种行为现在已经被复制到一个小型的3D打印多腿机器人中,有一天可能会在灾难现场寻找幸存者等应用中找到用途。
圣母大学(是一所私立天主教、研究型大学,位于美国印地安纳州南湾市东北部的圣母镇。)电气工程系助理教授Yasemin Ozkan-Aydin建造了这些小型多腿机器人,能够在具有挑战性的环境中进行操纵,并集体完成任务,模仿自然界的同类。这种四条腿的机器人长度为15至20厘米,或大约6至8英寸,配备了锂聚合物电池、微控制器和三个传感器--前面的一个光传感器和前后的两个磁性触摸传感器。
它的四条灵活的腿减少了对额外传感器和部件的需求,并使机器人具有一定程度的机器智能,这在与粗糙或不平坦的地形互动时很有帮助。Ozkan-Aydin说:“你不需要额外的传感器来检测障碍物,因为腿部的灵活性有助于机器人直接越过它们。"它们可以测试路径中的空隙,用它们的身体搭建一座桥梁;单独移动物体;或者在不同类型的环境中连接起来集体移动物体,与蚂蚁并无二致。”
这些机器人使用它们的磁性触摸传感器来确定它们相对于彼此的方向,并将它们的身体连成一串。这样,它们可以完成一些任务,如穿越缝隙、爬楼梯和在不平坦的地形上运输物体,甚至可以一起工作,搬运单个机器人无法处理的过大或过重的物体。
Ozkan-Aydin在2020年初开始制造这些机器人,并继续在家里或在她的院子里改进和测试它们。四条腿的机器人在草地、地膜、树叶和橡子上进行测试。它们还在长毛地毯上进行测试,矩形木块被粘在刨花板上,作为粗糙的地形。
她预计,这项研究的结果将为设计低成本的腿部群提供信息,这些腿部群可以适应不可预见的情况,并执行现实世界的合作任务,如搜索和救援行动、集体物体运输、空间探索和环境监测。Ozkan-Aydin现在正致力于改善该系统的控制、传感和动力能力,这对现实世界的运动和解决问题至关重要。她计划用这个系统来探索蚂蚁和白蚁等昆虫的集体动力学。
她说:“对于功能性蜂群系统,电池技术需要改进。我们需要能够提供更多电力的小型电池,最好能持续10小时以上。否则,在现实世界中使用这种类型的系统是不可持续的。" 其他限制包括需要更多的传感器和更强大的电机--同时保持机器人的体积小。”
网友评论0条评论
相关资讯
更多- 无人机“上架”盘点库存管理:AI与视觉技术助力仓库效率与准确性
- 霍尼韦尔携手Corvus无人机实现仓库盘点自动化
- Gather AI 携手 Burwell推广无人机 AI 驱动仓储解决方案
- 智慧冷链,守护新鲜 | 林德自动化携手厦门益和丰打造冷库智能仓储标杆
- 行业案例 | 牧星重塑3PL企业仓储运营
- 合力部件 产业基石——致力于成为全球一流的零部件供应商
- 星逻智能荣登2025 “低空经济最具投资价值企业TOP30”榜单
- 行业案例 | 牧星助力电商企业迈向更高效未来
- 战略签约!星逻智能与九识智能达成合作,闪耀亮相2025全球智博会
- 直击CeMAT Australia 2025,AirRob飞箱首登大洋洲,破解澳洲物流难题!