JT-Lab发布移动底盘-腾驴1.0
转载 2021-05-07 11:08 嘉腾机器人 来源:嘉腾机器人
2020-2021年,COVID-19疫情的持续影响,在全球引发了对于无人接触服务的庞大需求,相应的配送机器人、消毒机器人纷纷涌现,据有关报告显示,2020年,服务机器人的增量达到24%,且预测2021年,将会达到31%,尽管目前这种机器人只能完成以移动为主的单一、重复任务,却能解除人与人之间非必要的接触关系,为目前的服务人员摆脱感染风险,并且提供24小时不间断的劳动服务。
基于对客户需求的探求与对未来人机社会的想象,今年4月底,嘉腾完成了“腾驴1.0”移动底盘的研发,其将作为专业机器人的开发平台,为帮助客户开发自己的机器人提供“行走的能力”。

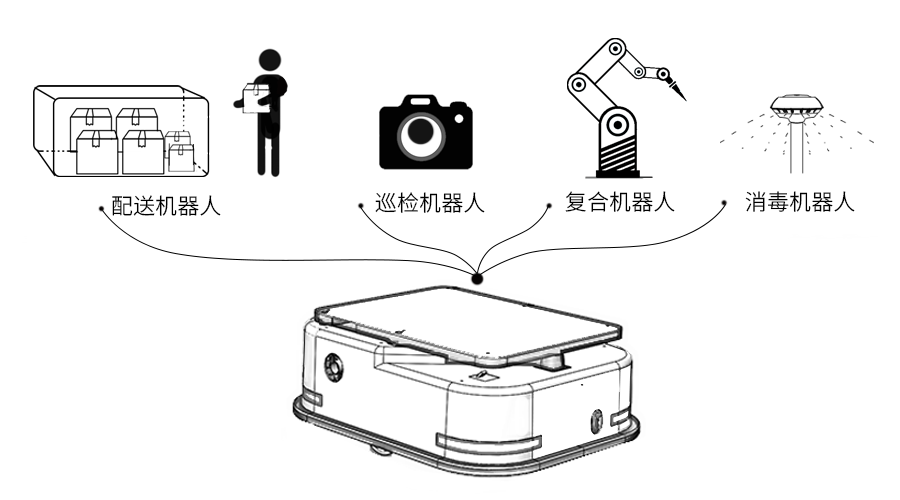
未来在这个平台上可加装不同的工作设备(如机械臂、相机、消毒设备、快递箱子),通过标准的API接口,开发者可快速开发出属于自己的服务型机器人,为终端客户提供如配送、消毒、快递寄送等服务。腾驴1.0仅作为提供移动能力及供电能力的组成模块。
JT-Donkey的四大特点
1.安全、稳定、可靠
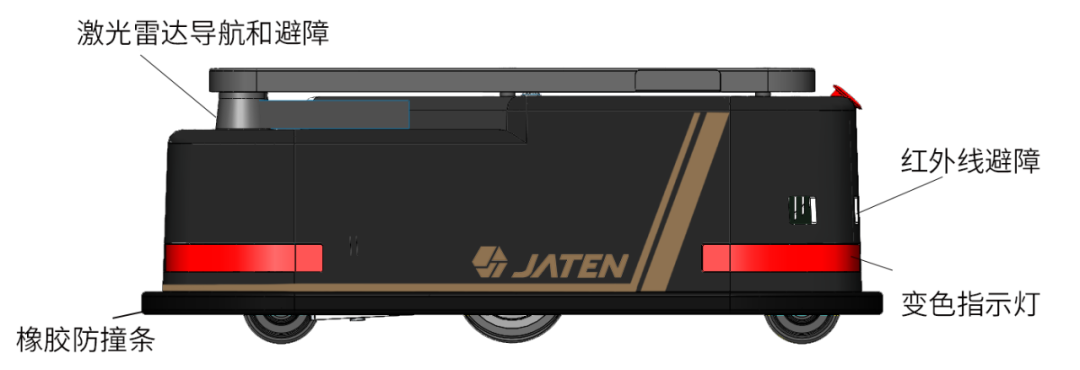
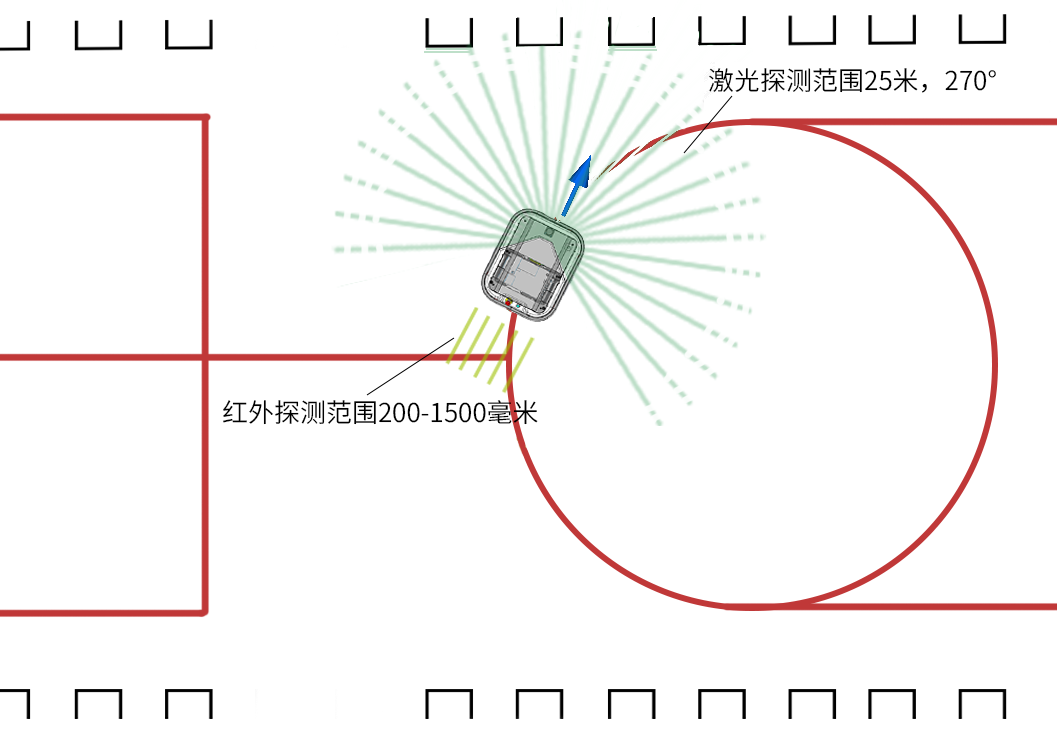
“腾驴1.0”在车体前、后方分别安装了激光雷达、红外传感器检测车体四周的障碍物,检测范围达到25米,同时在车体底部加装橡胶防撞条作为机械防撞的手段,还有四周的指示灯提醒行人机器的行走状态以及位置,从多方面保证机器人运行时安全性高、动作平稳、震动噪音小等。另外腾驴还配备了高品质数字功放喇叭,可进行警报、音乐播放和语音播放功能。
2.对使用场景的改造小,应用实施便利
移动底盘选用对场景改造要求最小的2D 激光SLAM导航定位方法,融合激光雷达、惯性导航和里程计等传感技术,实现对环境的全方位建模和特征识别,提供自动构图,定位,路径规划和导航等基础机器人行走能力。
如遇场景内环境变化较大或场景空旷、特征单一,也可通过安装不显眼的反光棒增加场景特征,保证导航定位的可靠性。
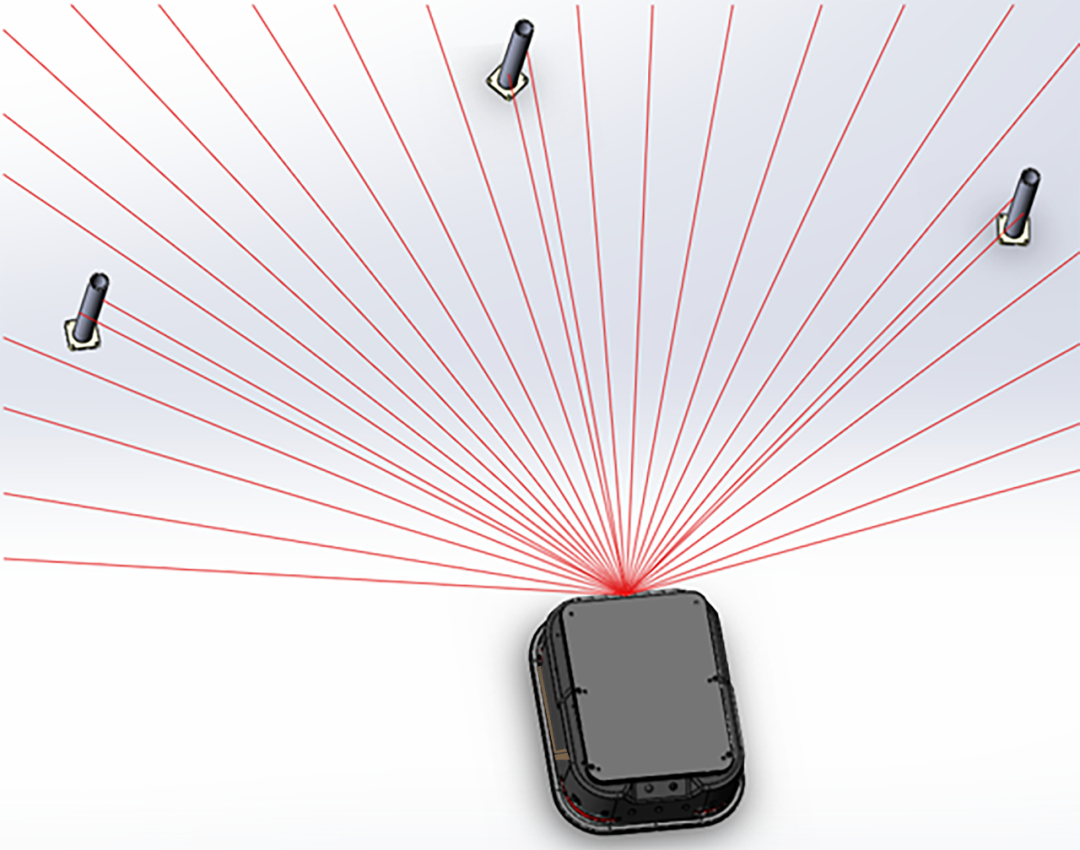
注:当激光光束到达反光棒上,光线会反射回车体,被激光雷达所接收,根据光传播速度可以计算出反光棒与底盘的距离,以此定位车体位置。
3.柔性行走适应变化环境
此底盘着重开发了对曲线运动行驶的性能优化,使得AGV可以在连续的曲线中自如行走;通过优化后的运动控制算法,在行走过程中,AGV实时计算最优行驶路径,保证其行走路线耗时最小,有利于提高机器人的工作效率,并适应在复杂环境(如大型商场、医院、机场)中灵活移动。
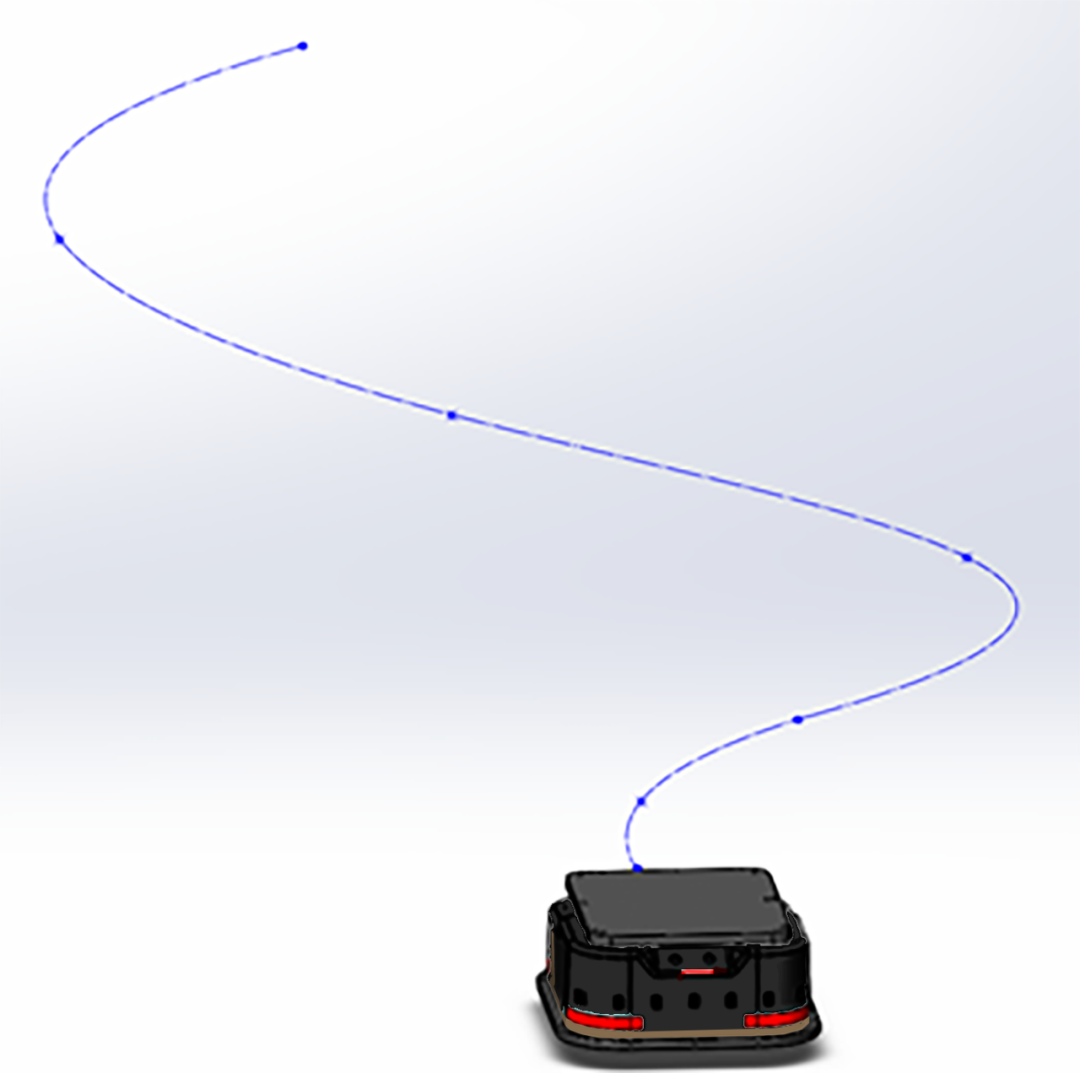
注:移动底盘在曲线路径行走示意
4.兼具自主行走与遥控行走模式
除了作为拥有自主能力的移动底盘外,腾驴1.0还支持手柄遥控能力,当机器人需要到达陌生场景、或完成复杂的工作任务时,可以通过工作人员在远处遥控的方式指引机器人完成相应的工作,如机器人的重新建图,或在洁净或污染工作区域中完成特定的工作。
技术规格参数
| 导航方式 | 激光SLAM | |
| 尺寸(mm) | 长 | 783 |
| 宽 | 623 | |
| 高 | 291 | |
| 行走方式 | 单向/原地旋转 | |
| 驱动方式 | 差速 | |
| 运载能力 | 150kg | |
| 自重 | 68kg(含电池) | |
| 行走速度 | 0 ~ 1m/s | |
| 工作电压 | DC 24V | |
| 电池类型 | 锂电 | |
| 电池容量 | 50AH | |
| 续航时间 | 满载 ≥ 8小时 | |
| 停止精度 | ±10~20mm | |
| 障碍物检测 | 前方25m,后方200mm-1500mm | |
| 建议使用场景 | 室内 | |

透露一下,腾驴2.0即将加入跟随行走、自主导航、动态避障、障碍物识别(视觉)等功能,敬请期待~