DreamVu:内部物流移动机器人的视野为什么很重要?
原创 2021-03-29 09:22 无人系统网 来源:无人系统网
自主移动机器人能够感知的越多,它的性能就会越好。每个传感器的视野越大,解决方案就越实用。
来自美国DreamVu Inc.首席技术官马克·戴维森(Mark Davidson)看法;
如果机器人无法感应到它,它将无法对其进行处理。无论是一个人,另一个正在接近的AMR,还是一个影响正在穿越的地形的物体,对于机器人来说,全面了解情况都是非常重要的。但是,这可能是不切实际的,这是因为材料清单成本,传感器和接线过多的重量,车载计算机没有足够的可用输入,或者由于准备,缝合,融合和/或同步所有软件所需的软件开销传感数据。
最大化感测范围的传感器的概念是具有逻辑意义的概念。然而,我们看到有如此多的传感器被用作“实际”的有限的感测场。图1是用于模拟大型视场传感器的多个立体视觉传感器的示例。
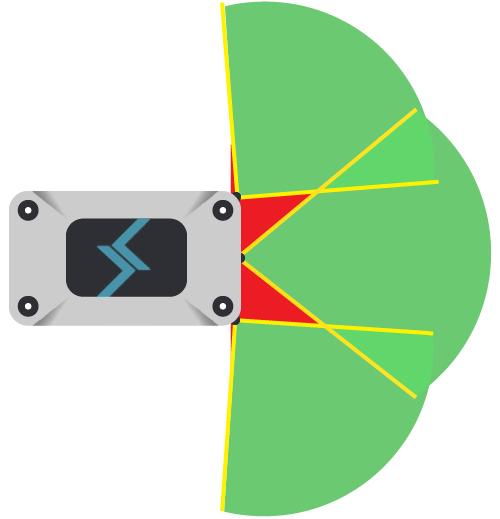
图1:三个普通的立体摄像机相结合,覆盖了AMR的整个向前运动范围。绿色代表深度场,黄色代表RGB场,红色代表盲点。
通常,当需要较大的感应场时,可以考虑使用LiDAR。尽管LiDAR确实提供了很大的水平感测场,但它却以垂直感测场为代价。除非系统当然可以负担得起3D LiDAR,否则即使如此,感测领域还是有限的。参见图2。
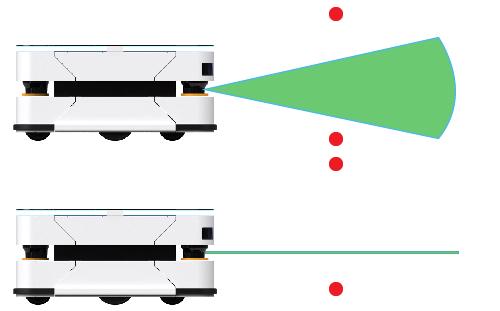
图2:垂直视野的示例。顶部代表标准立体摄像机和3D LiDAR。底部代表2D LiDAR。红色形状表示超出感应范围的物体。
经常选择LiDAR的另一个原因是距离范围和准确性。无疑,这是事实。但是,由于LiDAR是扫描传感器,因此在垂直扫描线之间以及在水平扫描期间可能缺少大量的上下文理解。
现在让我们考虑一个立体视觉系统,该系统不仅具有较大的水平视场,而且还具有较大的垂直视场。我并不是说这是一个完美的传感器。但是,它确实具有一些属性,可以通过提供较大的感应场来简化传感器堆栈。
首先,让我们介绍一下一个想法,即立体深度相机最多可具有360°的水平视场,而垂直方向的视场大于100°。此外,该立体摄像机的最小深度距离为零-这意味着该摄像机周围的任何地方以及从地板到天花板的大视野内都没有盲点。由于采用了创新的光学设计,因此没有活动部件,因此只需要一个CMOS传感器。
当我们从具有这些属性的立体摄像机开始时,像障碍物检测这样的任务就变得容易得多。尽管很少有机器人设计可以充分利用整个360°水平FoV,但从过多的FoV入手并通过软件命令将其减小,要比尝试通过多个立体摄像机和拼接来增加FoV更为直接。图3显示了在AMR的相对角上使用其中两个立体摄像机的配置,其有效负载位于顶部平台上。现在,只需使用两个摄像头,该机器人就可以对周围的情况有完整的了解。现在,机器人可以同样好地进行前进和后退操作。机器人知道障碍物是否从任何方向接近;它会知道是否有任何东西从有效载荷上掉下来。
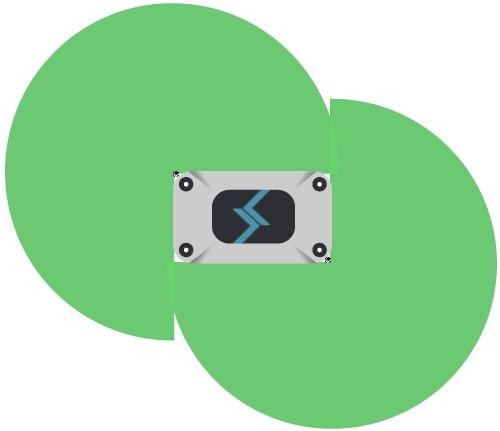
图3:两个大型视场立体摄像头完全围绕AMR提供全面的态势感知
图4显示了垂直FoV的好处。可以轻松检测到地面上或AMR上方悬挂的小障碍物。总体而言,这意味着将检测到任何可能干扰AMR的障碍物。
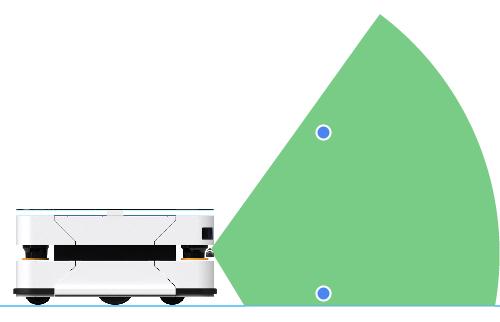
图4:垂直FoV在检测AMR加有效载荷高度范围内从地板到悬空的障碍物时的优势
此配置对于映射也很有用。障碍物检测数据可以与大多数SLAM算法兼容的2D或2.5D格式传输。而且,它是向3D映射迁移的价格合理且易于使用的解决方案,它具有许多优点,并有望在2021年晚些时候得到更广泛的采用。
我们可以认为这是一个理想的解决方案,但即使是这些立体摄像机也无法完成所有工作。为了获得安全认证或在低环境照明下运行,可能需要使用LiDAR。但是前提仍然有效。大型FoV立体摄像机可以大大简化任何机器人的传感器堆栈,尤其是AMR。
这台立体摄像机正在展示什么?它实际上是DreamVu,Inc.的全向立体声深度相机系列。PAL和PAL Mini均使用创新的光学器件和高效计算软件来消除所捕获的立体声图像的扭曲,因此沉浸式和密集立体声RGB对可用于AI算法,例如对象识别。如此一来,借助全面的占用地图,就可以有效地执行障碍物检测和避障(ODOA)。因此,可以在每帧中生成完整的3D点云,以进行数字孪生和3D映射。
没有完美的传感器,但是依靠大型FoV立体摄像机提供了一个简化传感器堆栈并帮助提高对机器人的上下文理解的绝好机会。大型FoV立体摄像机即使在没有纹理的普通墙壁上也不会上当。更少的传感器意味着更简单的校准和更多的正常运行时间。

图5:PAL和PAL Mini全向立体声深度摄像机
相关资讯
更多- 中力产品特刊 | 4-10吨锂电再上新!AI机器人组团出圈!5月“王炸”来袭
- 寻迹智行 | 一文读懂 VDA5050:AGV/AMR 跨品牌调度的「通用语言」
- 第三届中国工业车辆和移动机器人“金力奖”申报启动,年度行业盛典六月羊城揭晓
- 避坑指南|重载AGV/AMR算法踩坑难落地?欧米麦克教你轻松避坑
- “省”到离谱?窄通道克星用实力说话!
- "质量安全与机器人产业健康有序发展”系列活动暨首届机器人检验检测与标准认证研究大会在福州举行
- 开工大吉 | 搬运“神助攻”组团来应聘,助您一马当先!
- 挑战不可能!在“热气腾腾”的工厂里,我们如何实现丝滑自动化?
- 字节、美团、阿里联手 自变量机器人获10亿融资
- 喜报!诺力再度荣膺浙江民营跨国公司“领航企业”