一种可以让机器人判断他们是否可以举起重物的算法
转载 2020-09-14 08:58 京天机器人 来源:京天机器人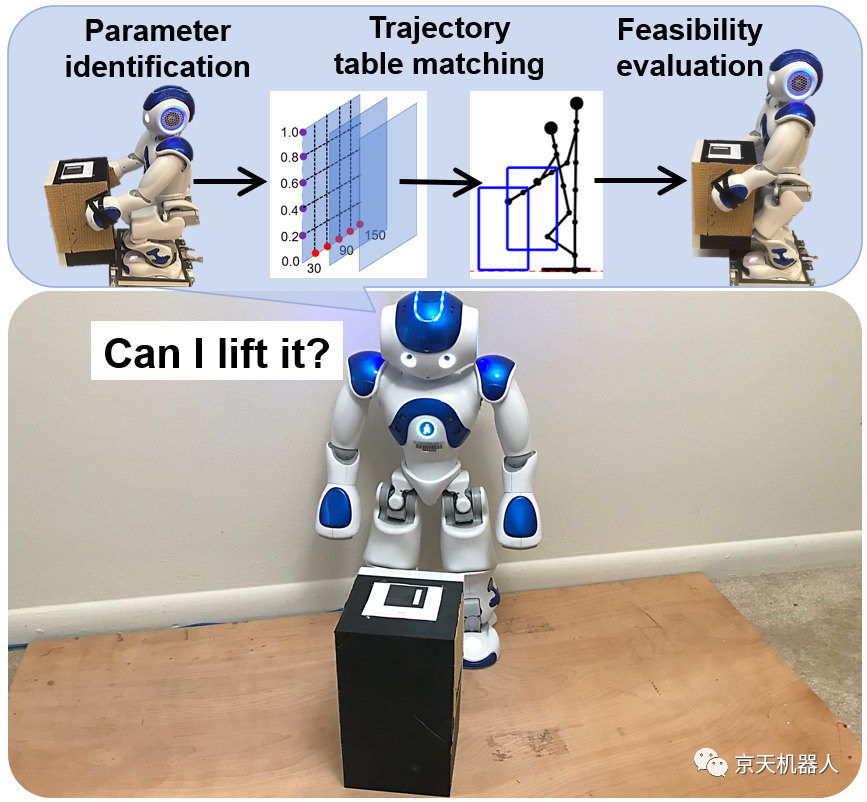
仿人机器人解释了使用三步法举起物理特性未知的沉重箱子的可行性
仿人机器人(仿人机器人具有与人体相似的构型)可能会迅速协助个人完成各种任务。这些机器人旨在完成的大部分任务包括选择各种形状,重量和大小的对象。
尽管许多经过开发的仿人机器人能够拿起小巧轻巧的物体,但是通常很难举起笨重的物体。实际上,如果物体太大或太重,机器人可能会发现自己在摔落或摔碎物体。
考虑到这一点,约翰·霍普金斯学院和新加坡全国大学(NUS)的研究人员最近才开发出一种方法,该方法可以使机器人找出是否能够携带未知体积的重物。这种方法是在arXiv上预先发表的一篇论文中介绍的,它可以使机器人能够更有效地搬运物体,从而减少了机器人解决无法解决或搬运的问题的机会。
“在提升人体参数未知的领域的可行性方面,我们特别关注了仿人机器人的运动方式,”进行这项检查的许多研究人员之一韩元锋指出。完成搬运任务,机器人通常必须首先确定该领域的身体参数,然后生成一个完整的运动轨迹并且符合现场的安全“。
机器人产生允许其携带对象的运动轨迹的方法将在计算上要求很高。实际上,仿人机器人有时具有过多的自由度,其体形为携带物体而必须进行的运动应该满足许多完全不同的约束。因此,如果一个物体太重或它的质量中心离机器人太远,则机器人几乎肯定无法完成该运动。
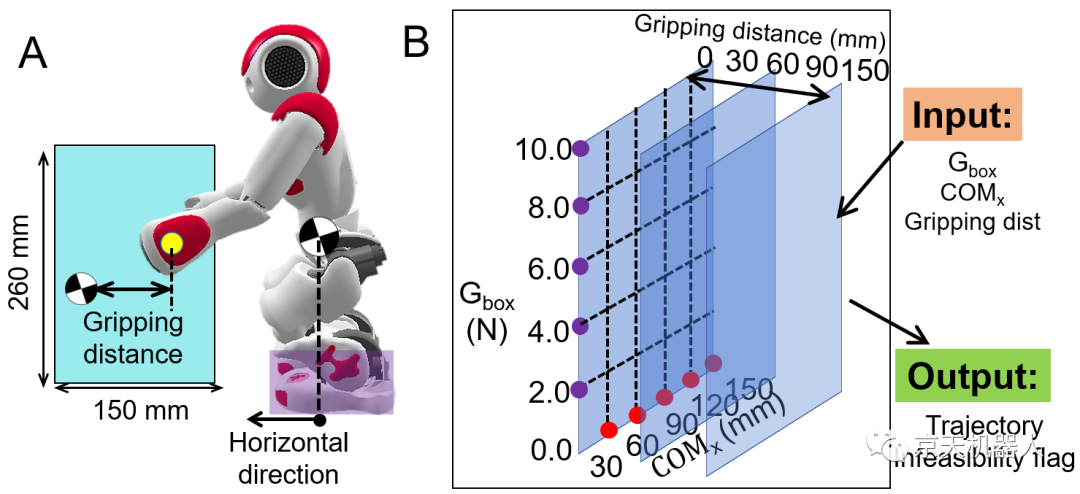
定义我们的动机之后,请考虑我们这些人,我们是否能够举起类似于哑铃的重物。“我们首先用哑铃实验,以确保对物品有一定的感觉。然后,主要基于我们较早的专业知识,我们会知道它是否太重而无法携带。同样地,我们的技术始于建立一个轨迹工作台,该工作台通过仿真为机器人节省了完全不同的合法举升运动,相当于各种领域的身体参数。然后,机器人会考虑使用这张办公桌,因为它拥有早期的专业知识。”
Han与他的同事Ruiui Li和他的主管Gregory S. Chirikjian(NUS的教授兼机械工程学系主任)合作开发的方法允许机器人通过简单地获取磁场的惯性参数与之互动。随后,该机器人似乎再次处于该策略生成的轨迹台上,并检查它是否具有提升运动以使其可以携带带有这些估计参数的场地。
如果存在这种运动或轨迹,则应考虑可能要举起物体,并且机器人可以立即履行职责。如果不存在,则机器人会考虑超出其能力的职责。
“从根本上说,我们的技术离线构建的轨迹台会根据磁场的惯性参数变化保存合法的全身举升运动轨迹,” Han说。“随后,我们开发了一种基于物理交互的主要算法,可帮助机器人安全地与磁场协同工作并估算磁场的惯性参数。”

全新的方法使机器人可以快速决定是否能够完成举升相关的过程。因此节省了时间和计算能力,因为它避免了机器人必须在每次举升尝试之前(甚至是失败的举升尝试)更早地进行全身运动。Han和他的同事们利用NAO机器人(软银机器人公司开发的一种著名的仿人机器人)在一系列动作中评估了他们制定的策略。在这些试验中,NAO迅速成功地识别了使用全新方法无法实现或非常麻烦的物体。不久的将来,不同的人形机器人可能会使用相同的方法,使它们在完成载重物或重物的任务时更加可靠且对环境友好。该技术可以显着提高取放任务的工作效率,特别是对于可重复的任务,在未来的工作中,计划将此策略用于完全不同的目标或任务。
参考文献:Han Y, Li R, Chirikjian G S. Can I lift it? Humanoid robot reasoning about the feasibility of lifting a heavy box with unknown physical properties[J]. arXiv preprint arXiv:2008.03801, 2020.
网友评论0条评论
相关资讯
更多- 直击CeMAT Australia 2025,AirRob飞箱首登大洋洲,破解澳洲物流难题!
- GreenBot发布自主除草系统
- 卡斯卡特AGV软包夹在化纤行业的应用
- 无人车加速进入多种场景,中盈医药联手菜鸟打造全国最大无人医药运输车队
- 同期会议丨低空产业出海研讨会,助力中国企业走进阿联酋市场
- “海燕”无人机再出动!精准捕捉台风“韦帕”动向
- 发挥低空经济优势,建立重大灾害社会力量无人机应急合作机制
- 纵横股份亮相中国国际链博会,以创新供应链赋能低空经济
- 北京航空航天大学段海滨:无人机集群仿生智能应用前景广阔以及无人机技术难题及防控进步
- 2025国际无人机大会:苏州览众科技董霞展示共轴微型AI无人机