AGV小车方案设计—反光柱、充电站布局
转载 2020-09-08 15:15 凌鸟智能 来源:凌鸟智能
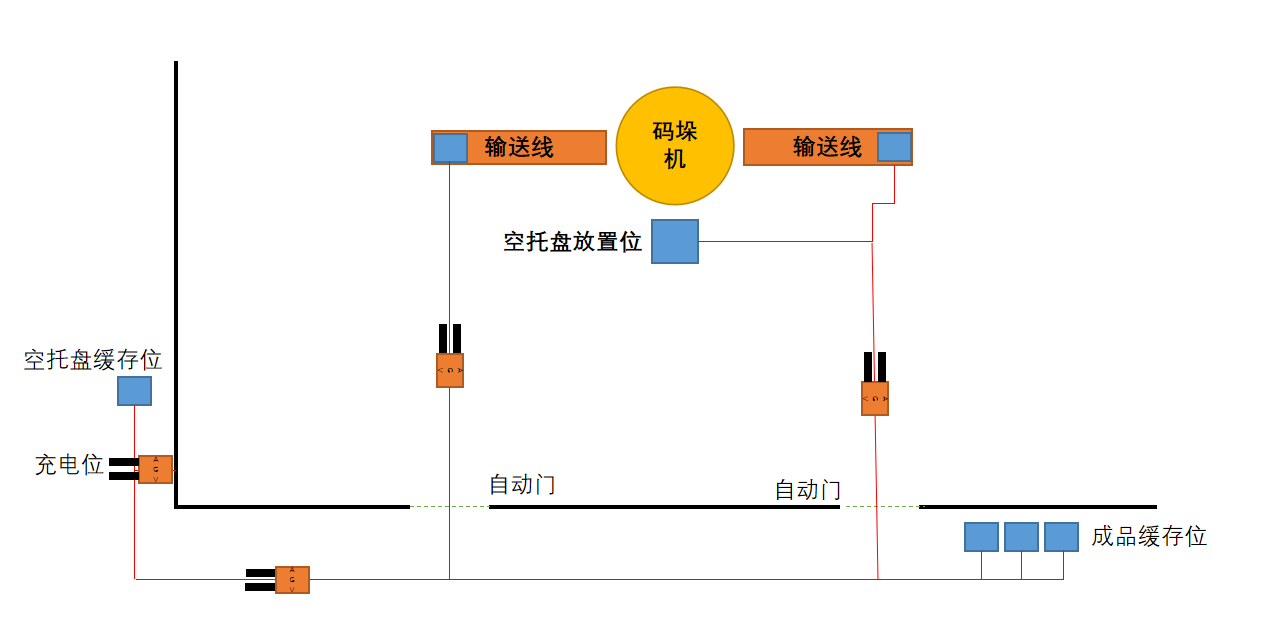
作业流程示例:
1、当码垛机空托盘放置位托盘用完后,向AGV系统发出信号,AGV小车将一推空托盘从空托盘缓存位搬运至码垛机空托盘放置位。空托盘缓存位人工再及时补充空托盘。
2、码垛机成品码垛完成后,输送线发出信号给AGV系统,AGV前往输送线末端叉取成品托盘搬运至成品缓存位。
注意事项:
1、AGV带有前进方向障碍物检测装置,如果地磁感应自动门发生故障,AGV可以自动检测自动门是否升起避免发生碰撞。
2、成品缓存位3个位置安装地面光电感应装置,检测货位存储状态。
相关资讯
更多- 林德物料搬运亮相LogiMAT 2026:让自动化真正服务于用户
- LogiMAT 2026展会回顾:诺力用技术创新解锁物流智能化
- 合力LogiMAT 2026:一场关于“系统性能力”的欧洲叙事
- 赋能工厂自动化·链接全球物流——SuperAnt无人叉车亮相墨西哥物流世界峰会暨博览会(Summit & Expo The Logistics World)
- ALL IN 细节:中力股份携全场景数智方案亮相LogiMAT 2026
- 榕城聚势·搬易无忧——MiMA“C计划”走进福州暨福州营销服务中心产品推介会圆满落幕!
- 从“看见”到“看懂”,上海海思 X 迈尔微视全栈dToF方案赋能具身智能跃迁
- 从“看见”到“看懂”,上海海思 X 迈尔微视全栈dToF方案赋能具身智能跃迁
- 聚焦新质生产力!林德自动化亮相2026物流技术大会,共探智慧物流新未来
- 凯乐士科技成功登陆港交所