西门子PLC应用实例:简易机械手的PLC控制
转载 2020-08-10 10:28 技成培训 来源:技成培训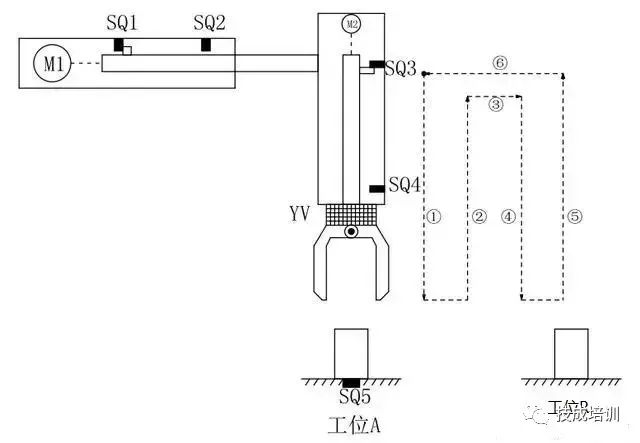
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
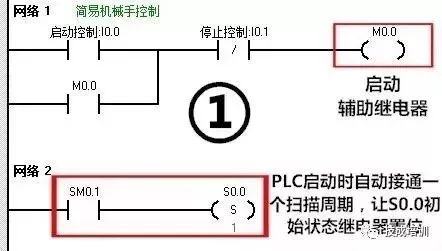
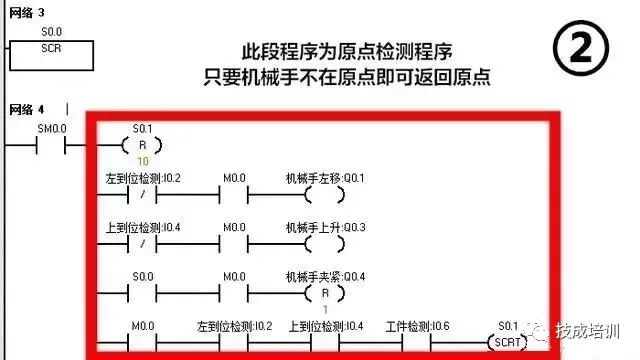
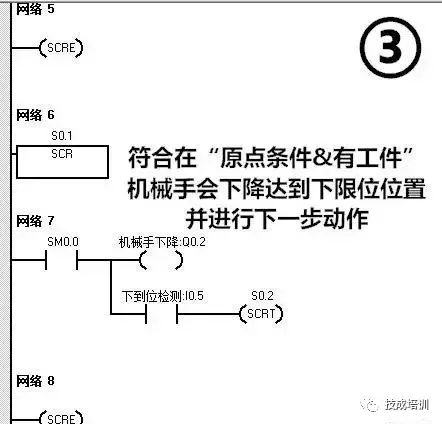
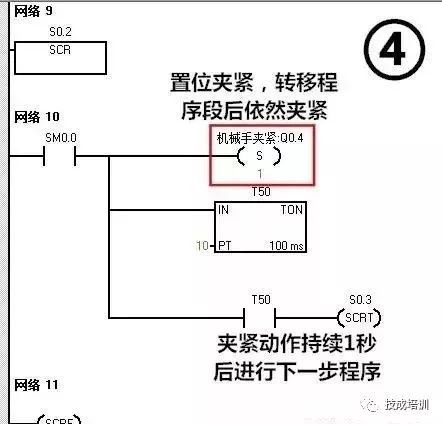
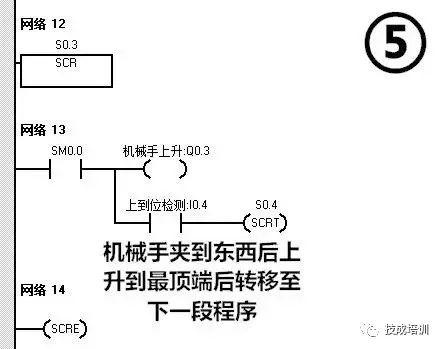
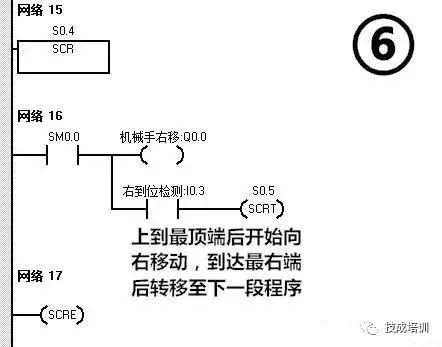
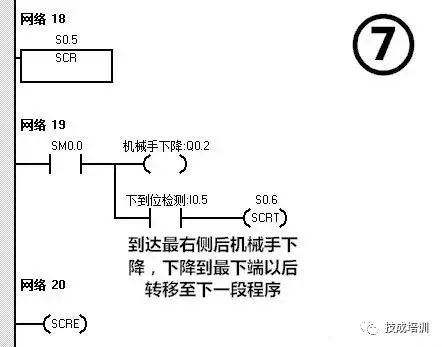
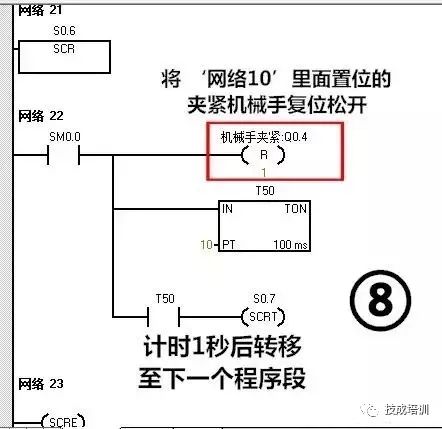
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
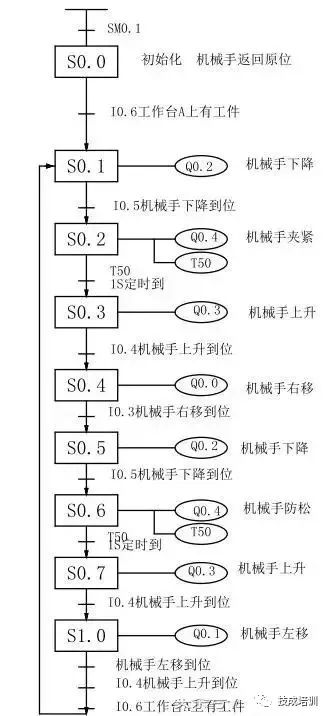
如下图所示:
编程前理顺动作如何转移:
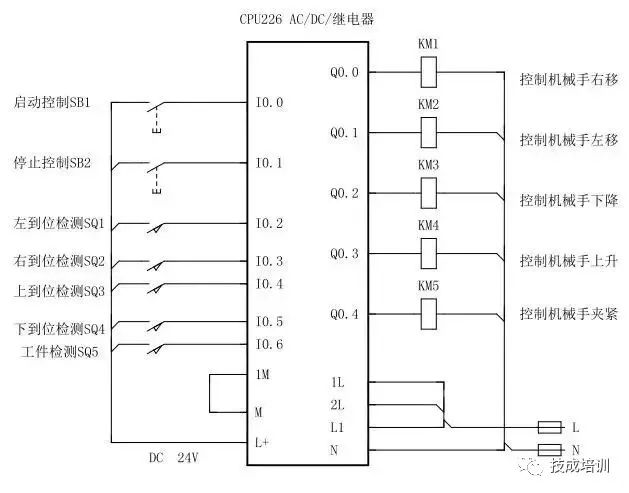
定义符号表:

硬件的接线图:
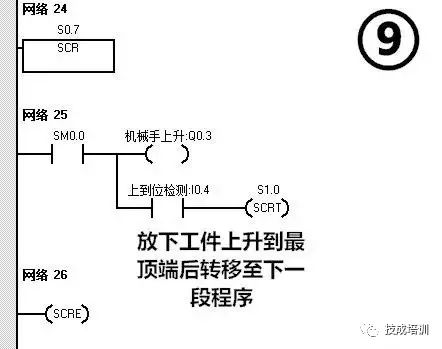
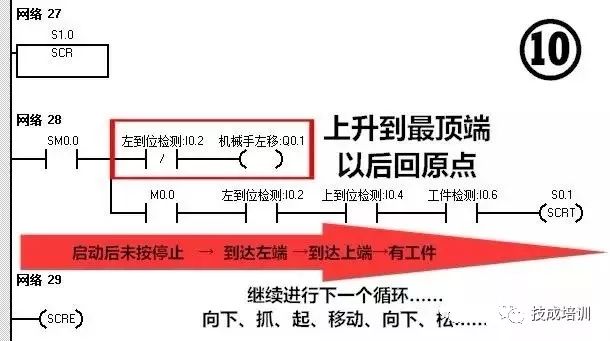
满足所有动作的程序如下:

下面我们一段一段分析这个机械手是如何工作的:
网友评论0条评论
相关资讯
更多- 中国航空工业集团研制获批4项ISO国际标准
- 诚挚感谢LET&IRE 2025所有伙伴与参与者,2026年5月广州再聚!
- Wiferion:Hikrobot将其无线充电功能技术集成到AMR中
- AGV多车联动技术在智能制造中的应用:高效运输的“柔性引擎”
- 强省会 拼经济 | “贵安造”机器人实现全线投产
- 寻迹智行亮相2025汽车零部件物流大会,共探智慧物流新思路
- 数智工厂×智慧物流:LET 2025物流展今日正式开幕
- 以“智驾”革新物流搬运新生态 三一机器人A7智能搬运车在CICEE发布
- 【喜报】 乐亿通ROYPOW荣获“湾区知名品牌”称号
- 品牌展商五月齐聚LET 2025:共筑“数智工厂×智慧物流×机器人”新生态