仙知小课堂|仙知网络协议API使用教程(十九)
转载 2020-05-20 08:55 Seer Robotics 来源: 仙知机器人Seer
为方便用户更高效的使用移动机器人,仙知向用户开放机器人操作的相关 API。
★仙知小课堂★
之前分别介绍了机器人配置API—API列表、回收控制权、释放控制权、SRC获得控制、SRC释放控制等,本期将继续介绍“上传地图到机器人”、“从机器人下载地图”、“删除机器人上的地图”及“配置超声”“配置DI”:
上传地图到机器人
请求
编号: 4010 (0x0FAA)
名称: robot_config_uploadmap_req
描述: 上传地图到机器人
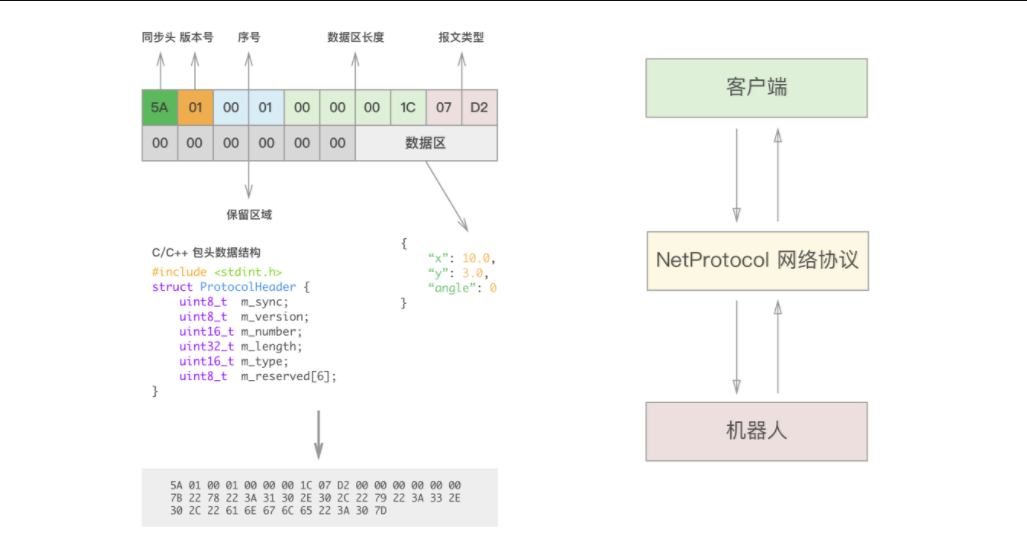
JSON 数据区: 见下
数据区中的内容为整张 json 格式的地图, 地图详情请参见附录C: 地图 .smap
请求示例
略
响应
编号: 14010 (0x36BA)
名称: robot_config_uploadmap_res
描述: 上传地图到机器人的响应
JSON 数据区: 见下表

响应示例
略
从机器人下载地图
请求
编号: 4011 (0x0FAB)
名称: robot_config_downloadmap_req
描述: 从机器人下载地图
JSON 数据区: 见下表

请求示例
略
响应
编号: 14011 (0x36BB)
名称: robot_config_downloadmap_res
描述: 从机器人下载地图的响应
JSON 数据区: 见下表
如果不发生错误, 数据区中的内容为整张 json 格式的地图, 地图详情请参见附录C: 地图 .smap
如果发生错误, 数据区为下表内容:
响应示例
略
删除机器人上的地图
请求
编号: 4012 (0x0FAC)
名称: robot_config_removemap_req
描述: 删除机器人上的地图
JSON 数据区: 见下表
请求示例
略
响应
编号: 14012 (0x36BC)
名称: robot_config_removemap_res
描述: 删除机器人上的地图的响应
JSON 数据区: 见下表

响应示例
略
配置超声
请求
编号: 4130 (0x1022)
名称: robot_config_ultrasonic_req
描述: 配置超声
JSON 数据区: 见下表
用于配置某个 ID 的超声是否启用

请求示例
略
响应
编号: 14130 (0x3732)
名称: robot_config_ultrasonic_res
描述: 配置超声的响应
JSON 数据区: 见下表

响应示例
略
配置DI
请求
编号: 4140 (0x102C)
名称: robot_config_DI_req
描述: 配置 DI
JSON 数据区: 见下表
用于配置某个 ID 的 DI 是否启用

请求示例
略
响应
编号: 14140 (0x373C)
名称: robot_config_DI_res
描述: 配置 DI的响应
JSON 数据区: 见下表
响应示例
略
相关资讯
更多- 天能与柯锐世开展战略合作 深化绿色循环产业协同发展
- 72.54亿、13连冠!中力首份ESG报告,走出怎样的绿色智造突围之路?
- 不止于属具:卡斯卡特以场景化方案赋能物料搬运新价值
- 独轮安防机器人走向量产:Rollo Robotics 获 370 万欧元种子前融资
- “低成本、可扩展”:Draganfly 和 Palladyne 合作开发用于防御的无人机群
- 超20M立库落地OPPO,生产柔性跃升,铸就智能仓储新典范!
- 璀璨落幕 | 牧星精彩亮相英国IMHX,柔性智能物流解决方案闪耀国际舞台!
- 加速智慧物流技术产业化!无人物流科创园项目签约落地成都青白江
- 相约土耳其,天能邀您共赴「HOW-Hub of Warehouse2025」
- 九月展讯 | 慧仓出击,链动全球