水下机器人让水域救援更高效安全
转载 2020-03-17 18:06 天津深之蓝 来源:天津深之蓝海洋设备
水下机器人
让水域救援更高效安全!
世界卫生组织《全球溺水报告》显示,全球每小时有40多人溺水死亡,每年因溺水失去生命的人约有37.2万人。而我国每年有5.9万人死于溺水,其中未成年人占95%以上。
潜水员参与救捞工作时面临着很大的风险,主要包括:
细
☑水流速度大时,潜水员为了潜入水底可能需要通过携带铅块增加自身重量,增加风险
☑水下情况复杂多变,可能存在涡旋、残余渔网等,加大风险
☑ 一些水域环境可能存在石油污染、化工污染,对救捞人员身心伤害极大
在这种情况下,水下机器人下潜深度大,不受水流、水温、能见度等因素的影响,同时拥有一定的续航能力,可以长时间在水下工作,在应急救援中的应用也越来越受到人们关注。
Underwater search
水下搜索
对于疑似范围比较明确的情况,如仅在几十米以内小范围摸索,一般采用小型水下机器人采取“定点下潜”的方式,借助声呐结合水面观察确认位置,完成一个区域的360°探摸。当搜索范围相对较大时,如上百米,可采用U 型往复搜索模式,水下机器人需要搭载超短基线、DVL、光纤惯导、机械扫描声呐、前视声呐等完成路径规划,通过软件确认位置,每次ROV转向到下一条搜索路线时,要保证声呐可以部分覆盖上一次路线的区域,确保不会有遗漏的区域。此时需要水下机器人有更强的搭载能力便于搭载各种定位装置。救援水域通常环境复杂,水流湍急,水下机器人需要有良好的推重比,能够快速高效地完成搜索任务。对于公里级范围的大面积扫描,则可使用自主水下航行器扫描。
定点下潜
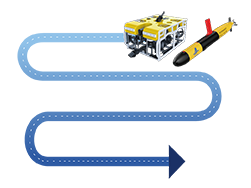
U型往复式搜索
下图为2017年河北唐山潘家口水库失踪事件中,现场水下环境复杂,原来是淹没的村庄,所以会对ROV运行以及发现待救援潜水员造成很大工作困难。现场多家队伍联合作业,深之蓝对分配的区域进行往复扫描,最终发现潜水员用钢瓶。
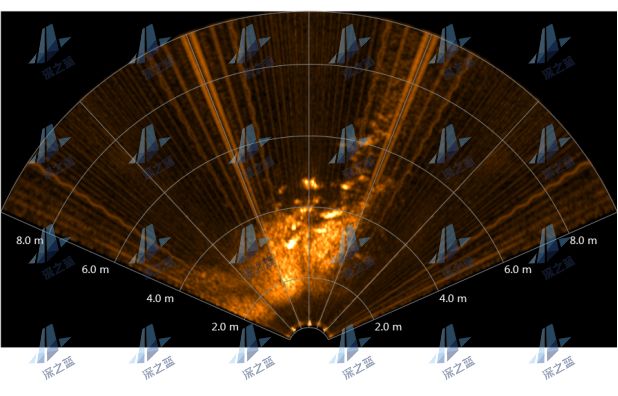
潘家口事件声呐搜寻到钢瓶

万州公交车落水事件中声呐搜索到疑似目标
Underwater observation
水下观察
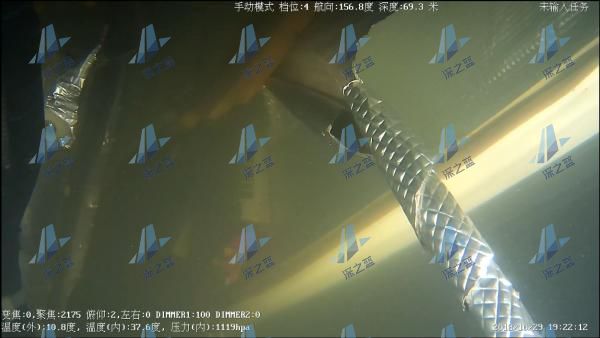
通过搜索发现疑似目标后,水下机器人可抵近观察,通过摄像机确认搜索目标。深之蓝水下机器人具备灵活的运动能力,可在不搅动水下浊物的同时稳定抵近目标物。水下机器人搭载的光学观测组件相互配合,可非常直观的反应现场情况。例如,对于浑浊水域,适合采用定焦模式,自然光照较强时,黑白成像可有效抵消湖水的绿色、海水的蓝色带来的影响;有悬浮颗粒物时,可选用低亮度的灯照与低照度的摄像头。深之蓝提供多种水下光学观测组件选择,适应不同工作环境需求:
| 深之蓝光学组件 | ||
| 水下摄像机 | 水下照明灯 | 云台 |
| 2.8mm定焦 彩色0.003 LUX@ F1.4 黑白0.001 LUX@ F1.4 2.8-12mm变焦 彩色0.05 LUX@ F1.6 黑白0.01 LUX@ F1.6 4.3-129mm变焦 彩色0.05 LUX@ F1.6 黑白0.01 LUX@ F1.6 | 单色40W灯 单色80W灯 泛光300M照明灯 | ±90° |

深之蓝水下机器人抵近大渡河落水公交车确认车牌
深之蓝水下机器人进入重庆万州事件中落水的公交车观察
Underwater positioning
水下定位
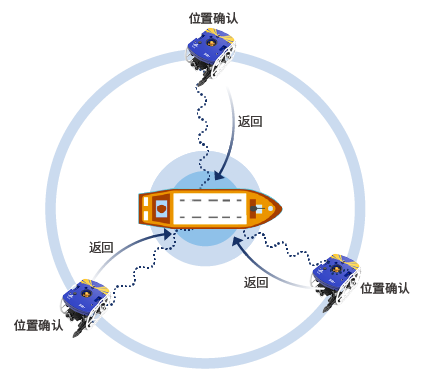
由于GPS信号在水下不能传输,水下机器人一般选用超短基线水下定位系统确定水下潜器的相对位置和运动轨迹。超短基线也叫做USBL,分为收发机阵和应答器两部分,应答器安装在ROV上,收发机阵从岸上或船上放入水下。收发机阵发射信号到应答器,并接收应答器的回馈信号,利用各个阵元之间的相位差(或者时延差)来测量目标的方位,从而计算出ROV在水下相对收发机阵的位置。再结合ROV内置的罗经和水面上的GPS等系统,即可获得ROV的绝对坐标位置。

Underwater grab
水下抓取
水下机器搭载机械手,可对水下目标物抓取,拖曳,下为深圳高交会的救援演示中,深之蓝水下机器人搭载单功能机械手对管道中的“假人”进行“救援”,假人重200余斤,从视频中可以看到,水下机器人顺利将假人拖曳至洞口,再由岸上人员拉出水面。
深之蓝提供多种机械手选择,可配合水下机器人完成不同要求的任务。

单功能机械手

两功能机械手

五功能机械手
Water rescue star products
深 之 蓝
水域救援明星产品
蓝鲸水下机器人
✅优化结构布局,超强抗流能力
✅ 兼容多种搜索定位附件,适应大范围搜索
✅ 自动定高、定深、定向,快速高效抵近目标
✅ 多屏显示,不遗漏任何重要细节

白鲨Mini水下机器人

✅ 超轻重量,轻松携带
✅ 运动灵活,适应狭小空间
✅ 智能悬停,定点观察
水域救援摄录平台
✅ 高清摄录,取证方便
✅ 一按即走,操作简单
✅ 三档速度可调,动力强劲

相关资讯
更多- Trinity Robotics获超50万欧元融资扩大自主战斗车辆生产能力
- Robust.AI携手Aptiv升级Carter机器人
- ExRobotics推出北美首款UL认证防爆巡检机器人
- Agility Robotics将借壳上市 加速人形机器人商业化
- Avride引入云端视觉语言模型:AI“安全大脑”推动配送机器人迈向复杂环境自主运行
- Kraken Robotics 6.15亿美元收购水下机器人Covelya公司
- HIVE融资1500万美元布局工业“物理AI”
- ABB推出F712自主叉车AMR,采用Visual SLAM视觉导航
- Raymond在Automate 2026推出全新 Raymond Courier™ 自动牵引车
- 从“改造既有设备”到“全栈自研”,Cavalla以新一代自动化叉车重构仓储供应链效率