全球首个液态全柔性智能机器人在天津大学诞生
转载 2019-11-12 10:43 新华网 来源:新华网《西游记》中孙悟空能够“七十二变”,甚至化身一只小虫钻到妖怪肚子里大显身手的故事,寄托了古人对于微观世界的大胆创想。随着科技发展,柔性电子技术有望让微型智能机器人实现“七十二变”。
近日,天津大学精仪学院黄显教授团队成功研发全球首个液态全柔性智能机器人,有望成为柔性电子产业和植入医疗器械的革命性突破,能72变的“血管医生”让神话成为现实。相关研究成果近期发表于国际工程和自然科学领域权威期刊《尖端科学》,并得到国家自然科学基金和天津自然科学基金等支持。
据了解,柔性电子器件具有超薄、柔性、可延展的“类皮肤”特性,在能源、医疗、通讯等领域拥有广阔前景。理论上,利用柔性电子技术研发的微型“软体”机器人可以反复改变形状,实现运动、抓取、运输和触觉感应等功能。但现阶段“软体机器人”依然面临“硬伤”,需要依赖传统的刚性传感元件和电路,严重阻碍了性能的实现。现代社会的多元化需求急切呼唤“全柔性”机器人的出现。
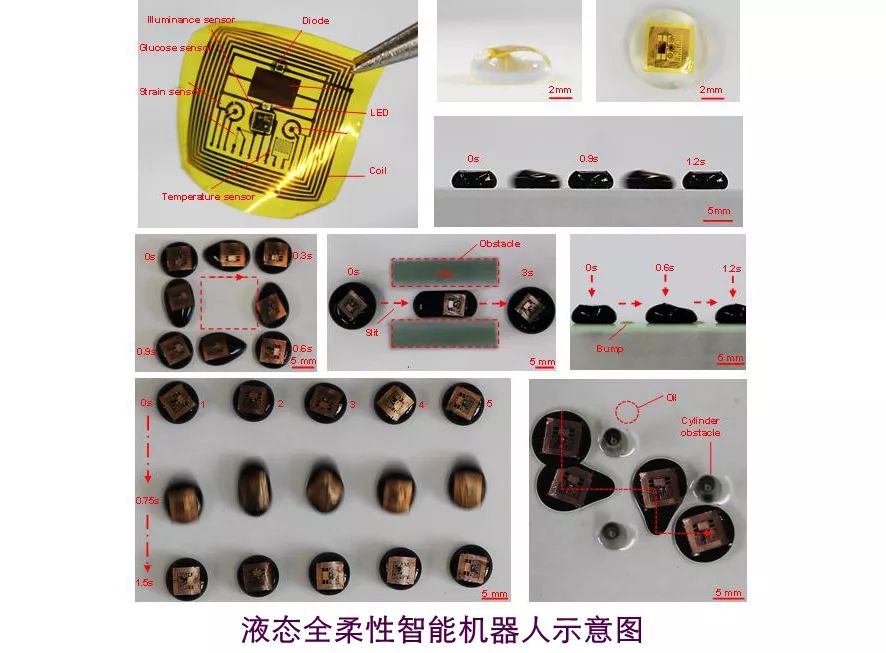
在机器人领域,不少研究人员会利用仿生学原理,主动模拟那些自然界的鸟类、昆虫等生物,从而让机器人获得与之相近的行动方式及能力。同样,天津大学黄显教授团队受自然界柔软的水母、轮虫等腔肠动物和浮游生物的启发,利用液滴的柔软无定形特性和柔性电子器件的超薄柔软特性,构建了一种全新的“智能液滴”——液态全柔性智能机器人。这是一种超小型、全柔性、可编程控制的液态智能机器人,能够在不同环境条件下实现运动、变形和传感测量。不过其大小在世界上仍然还不是最小,据了解,在 2018 年,麻省理工学院便研制出一种用石墨烯制成的微型机器人,只有细胞般大小,形态和粒子差不多。
黄显教授说,理论上,利用柔性电子技术研发的微型“软体”机器人可以反复改变形状,实现运动、抓取、运输和触觉感应等功能。但现阶段“软体机器人”依然面临“硬伤”,需要依赖传统的刚性传感元件和电路,严重阻碍了性能的实现。现代社会的多元化需求急切呼唤“全柔性”机器人的出现。
“这种机器人除了具备良好的运动和环境适应能力之外,还搭载了多种传感器,如温度传感器、湿度传感器、光学传感器、应力传感器、葡萄糖传感器、食品毒素传感器和无线能量采集模块等。”黄显教授介绍说,未来可应用于基因测序、化学合成、药物递送等领域,有望成为能进入人体检测治疗的“血管医生”,具有十分重要的科学意义和应用价值。
网友评论0条评论
相关资讯
更多- 中国航空工业集团研制获批4项ISO国际标准
- 诚挚感谢LET&IRE 2025所有伙伴与参与者,2026年5月广州再聚!
- Wiferion:Hikrobot将其无线充电功能技术集成到AMR中
- AGV多车联动技术在智能制造中的应用:高效运输的“柔性引擎”
- 强省会 拼经济 | “贵安造”机器人实现全线投产
- 寻迹智行亮相2025汽车零部件物流大会,共探智慧物流新思路
- 数智工厂×智慧物流:LET 2025物流展今日正式开幕
- 以“智驾”革新物流搬运新生态 三一机器人A7智能搬运车在CICEE发布
- 【喜报】 乐亿通ROYPOW荣获“湾区知名品牌”称号
- 品牌展商五月齐聚LET 2025:共筑“数智工厂×智慧物流×机器人”新生态