基于全局地图的AGV小车导航设计方案
转载 2019-10-06 20:11 电子城集团 1周前 来源:中国工控网随着工业4.0时代的到来,AGV机器人作为智能物流体系中的重要设备之一,以其降低物流成本,提升物流效率等优势,在物流市场上占据着越来越重要的地位。
AGV的应用正突破传统的仓储、机械制造行业,在港口、机场等行业也有一定的需求。
AGV设备需考虑导航、安全防护、货物识别、运动控制等要素,本次小编要介绍的是AGV小车的导航方案。
实现AGV导航的方法大致可分为基于全局地图(如激光扫描,二维码读取)和基于路线引导(如磁导航,荧光导航)两种。接下来将针对这两种方法分别提供Sick产品的对应方案。
基于全局地图的AGV导航
优点:路径自由,可灵活编程
1. 激光导航
通过反光板:通过测量预先布设的地标(反光板)来确定当前位置和方向
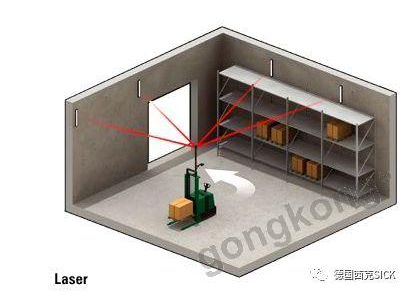
SICK 首选产品: NAV310/350
通过轮廓扫描:通过扫描四周的轮廓特征,确定当前位置和方向

SICK 首选产品:LMS111
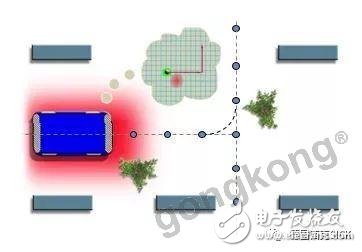
2. 二维码坐标导航
通过读取网格状分布的二维码,确定坐标方位

SICK首选产品:Inspector P30 / PI50
基于线路引导的AGV导航
优势:性价比高,调试简单
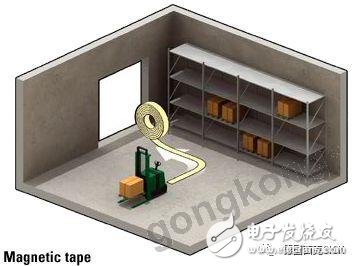
1. 磁条导航
通过读取预先布设的磁条,通过磁感应信号,检测磁条与传感器中心点相对距离,是小车沿既定方向行驶
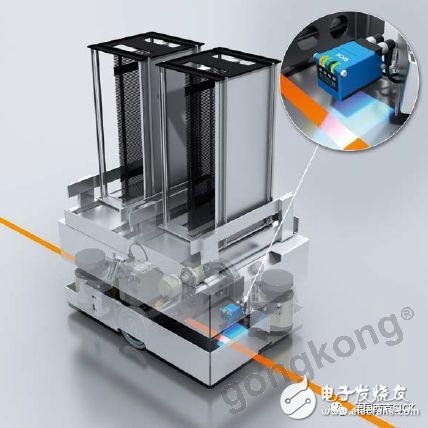
2. 荧光色带导航
通过读取预先布设的色带,通过检测色带中心位置,使小车沿既定方向行驶
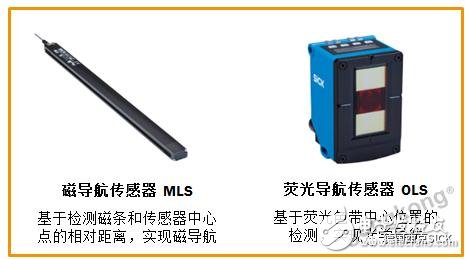
此类线路引导方式的导航,极少厂家提供传感器方案,为补充并丰富化AGV导航解决方案,SICK在2018年推出了 磁导航传感器MLS 和 荧光导航传感器OLS!
实现AGV小车自主驾驶“路线导航”应用
说得那么厉害,我们家自己买一些磁性开关或荧光开关也能实现啊~
下面这些功能,你们家组装的能实现吗?
磁导航传感器MLS系列
✔支持磁块标记识别,获取转弯/停止等命令
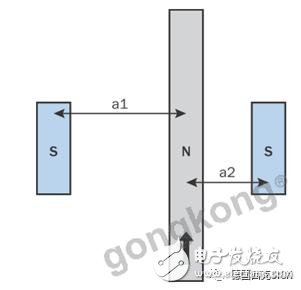
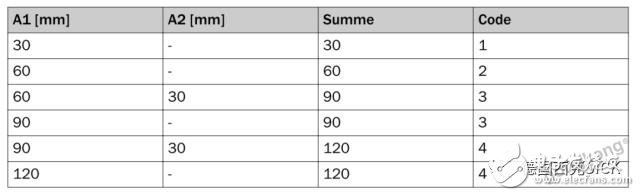
通过磁块标记距离导航磁条中心的距离来表现不同的代码,如下表
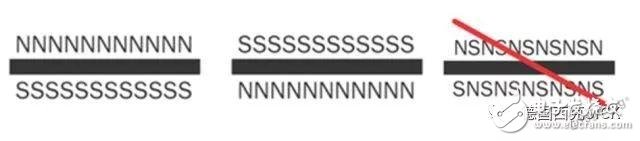
✔MLS 可兼容
⚫ 无论单面N 或单面S
⚫ 无需限定磁条宽度及磁性强弱
✔支持识别3组导轨

✔MLS 提供简易操作界面
⚫ 实时查看状态及代码输出
⚫ 实时查看磁场强度
⚫ 传感器参数设置

✔支持分辨率:1mm;重复精度1mm
✔感应范围200mm~600mm可选
✔支持CANopen
荧光导航传感器OLS系列
✔可通过阅读条形码,简化小车控制
⚫ 传输位置信息
⚫ 获取驱动指令

该条码须用荧光颜料打印
✔支持识别三组荧光色带

✔智能补偿
⚫ 补偿缺失/损坏的色带
⚫ 补偿被弄脏的色带

最多可补偿色带宽度的50%
✔支持180mm视野
✔极强的抗干扰能力(不受环境光/其他颜色干扰)
✔支持CANopen和TCP
网友评论0条评论
相关资讯
更多- 观众报名丨2025国际低空经济博览会国内观众预登记通道开启
- 专精特新“小巨人”赋能智造新生态 宇锋智能携最新一代智能搬运解决方案亮相137届广交会
- 2025年第一季度无人机行业新品全景速览
- 从"防"到"救"全覆盖!6月16-18日 2025广州应急展,一站式洞见安全应急万亿市场
- 活动报名:2025国际低空经济博览会全国巡回推介会——成都站即将召开!
- 2025第一季度低空经济行业融资动态
- 博索尼(BOLZONI)支持自动化转型
- 极客桥携全系列低空无人系统照明设备,将亮相2025国际低空经济博览会
- AVSS 确保 DJI M30 系列符合 ASTM F3322-24a 标准,可实现无人机在人群上空飞行
- 蓝芯科技宣布完成C+轮融资,加速3D视觉感知机器人产业布局