全局光学定位赋能集群机器人大空间智能运动
转载 2018-07-26 15:30 灵踪科技-老王 来源:灵踪科技
作为一种附着在机器人本体上的定位传感器,激光雷达是目前市场上较为流行的定位导航方式。在仓储分拣和产线自动化对接的应用场景下,定位系统的高稳定性和低投入产出比是客户选择产品方案的基本出发点。方案商长期依赖国外进口的中高端定位雷达,硬件采购成本和施工调试成本很高,这使得仓储类客户面临很大的运营压力。灵踪科技在分拣类仓库多次实地考察后发现,很多大型仓库的主干道两侧有货物堆放,此类型的主干道在万平米级的仓库种十分常见,而且主干道长度很长,有时接近300米。在分拣峰值时间段内,每天货物的进出高达2~3万件。频繁的货物搬运导致主干道两侧的“地图布局”发生很大变化。基于激光雷达的SLAM定位方式会产生定位歧义,无法给AGV提供稳定的位置信息。即使采用激光反光板的定位方式可以将问题部分缓解,但此类激光雷达的投入成本和反光板的施工成本很高,无法真正实现应用场景方案的快速复制。

-“预设地图”会发生频繁变化的大空间仓储分拣场景-
在柔性、小批量个性化制造的市场趋势下,灵踪科技发现产线自动化类客户对AGV在不同工位间的自主搬运提出实际需求:AGV集群在和后端产线进行生产物料对接时不仅需要很高的稳定性,同时对接精度要求毫米级。但在实际场景中,当相邻工位上两台AGV同时对接后端产线时,或在同一工位多台AGV依次进行物料对接时,实现规划的地图会出现“动态变化”,激光雷达无法及时响应这种变化,频频导致机器人定位系统稳定性和精度的下降。

-产线自动化AGV任务对接:高精度高稳定性-
灵踪科技完全自主研发的红外光曲面定位系统从全局的“上帝视角”给每台AGV提供稳定、可靠、高精度位置信息:该位置信息不受仓储布局变化的影响,同时对集群机器人的数量没有限制。

-灵踪科技完全自主研发的光学定位系统-
灵踪科技红外光学定位系统的最小单元包括两部分:光学基站和定位终端(包括定位器和光学标签)。定位系统根据机器人运动空间的大小可以柔性扩展,覆盖空间不限。以1000平米仓库为例,3-4个基站可以完全覆盖;放置在机器人本体上的定位器以35Hz的刷新率将位姿数据传输给机器人的控制系统。全局光学极大赋能集群机器人的大空间智能运动:不仅布置柔性灵活,而且高精度、高刷新率。

-灵踪科技光学定位系统的组成-
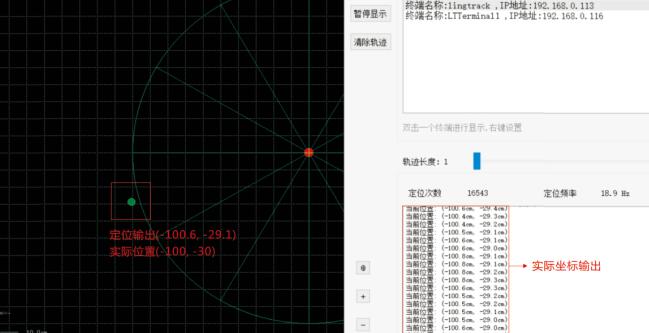
-全局定位:高精度、高稳定性-
灵踪科技已与数十家智能机器人公司集成达成深度合作,在珠三角和长三角地区已落地多家移动机器人大空间定位项目。

-客户现场基站布置和实时定位情况-
灵踪科技愿和更多的行业客户深入合作,深挖智能仓储和柔性生产线场景中移动机器人高精度定位需求:通过“柔性搬运的一小步”,迈向“智能制造的一大步”。