应用案例系列一 | 听风者多用途无人艇(M40)测量数据分析
转载 2018-05-31 09:17 云洲无人船 来源:云洲无人船
地 点:江门市某段航道西侧
时 间:2017年12月7日
任 务:某单位实际作业任务
测区面积:360*1000m²
作业时间:约5小时
使用设备:云洲M40系列无人艇“听风者”号
设备概况

设备技术参数:
排 水 量:450kg
外 形 尺 寸:3.3*1.9*1.6 m
最 大 航 速:8kn
续 航 能 力:8h
适 应 海 况:3级工作、4级生存
最大载荷重量:60kg
通 讯 距 离:5km
水面探障距离:50m
该艇可搭载多波束、单波束、侧扫、ADCP等不同任务载荷,具有自主航行,可按照设定的间隔(如10米间隔)在指定海域面积范围内自动完成水下地形测量、水下地貌探测、流量测量、重力磁力场测量、水下目标物寻找等测量任务。
本次测量任务中,该艇搭载T20P型多波束测量系统、wave master组合惯导系统和无线宽带全向通信天线,通过遥控基站发送测量任务,无人艇自动控制以上仪器,自主完成水深测量并实时回传数据至基站。
测量海区概况

广东省江门市某段航道西侧,该测区存在清淤船挖泥船定点作业,航道上常有运沙船等大型船只经过,测量条件相对复杂。2017年12月7日,在2级海况下,利用该艇共完成1000米×600米测区水下地形全覆盖测量,测线总长约26公里,其中主测线约25公里,联络测线约1公里。
主要作业过程
由于测试海区为江河航道,离岸较近,作业采用在岸基布放无人艇,并在岸基进行操控和数据采集(也可在调查母船上,通过A架或折臂吊布放回收,并在母船上布设通信天线及操控基站,实现无人艇操控作业)。

作业时通过货吊一体式吊车将无人艇运输至码头,直接吊放无人艇入水备航,在距测量水域100米的岸边完成无人艇控制基站及全向通信天线(架高离地面3米)架设等准备工作后,在控制基站上设定无人艇航行路径及测量设备任务工作参数(测量作业多波束开角为130°、模式为等距模式、多波束脚印分布均匀等),并向无人艇发送启动工作指令,M40无人艇随即按照预定航线开始自主航行、自动执行测量任务,历时5小时,完成了在流速1至2米/秒、逆流和顺流状态下的高贴线精度的水下地形多波束航行测量。
M40无人艇可根据任务规划实时测量并记录地形地貌数据,数据可实时回传至控制基站,也可存储于无人艇主机,靠岸后取回数据。
任务结束后,无人艇停靠岸边,采用长杆挂钩方式,将无人艇吊点挂到吊车挂钩上进行回收。
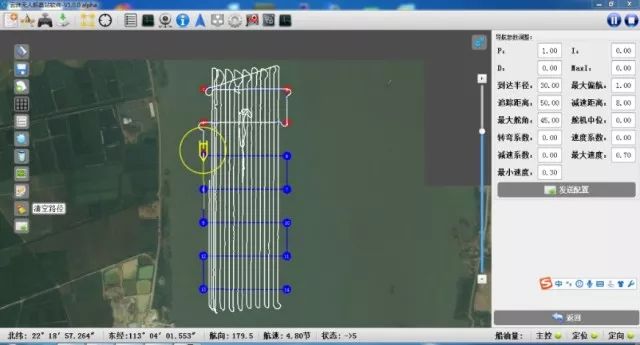
测区位置与M40无人艇巡线轨迹
多波束开角为130°,模式为等距模式,多波束脚印分布均匀,船的整体航向保持性较好;边缘波束损失较小,噪点极少,故航行噪声对多波束影响较小。
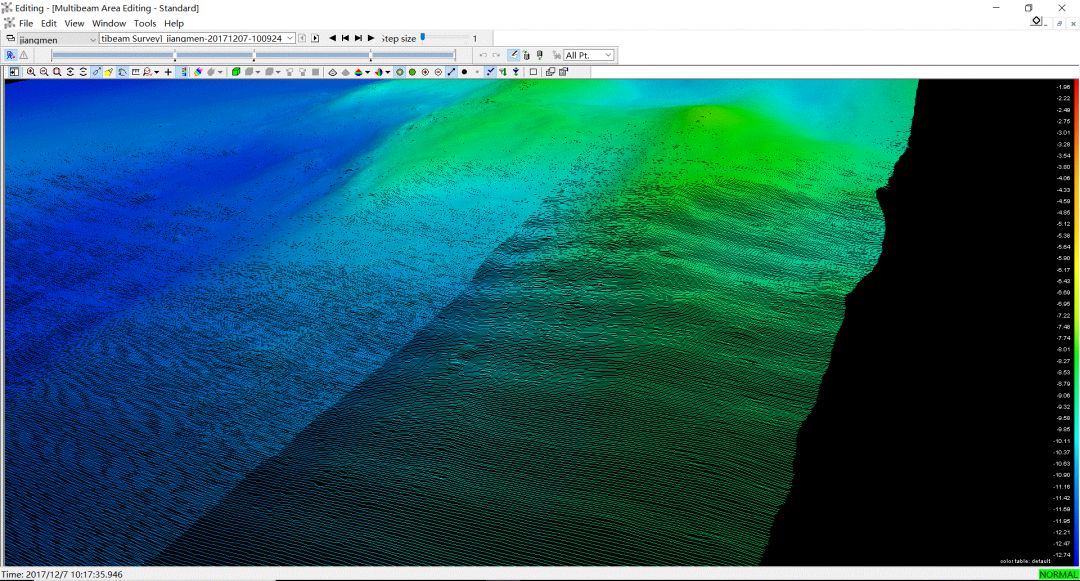
多波束测线脚印分布(含测线重叠区)
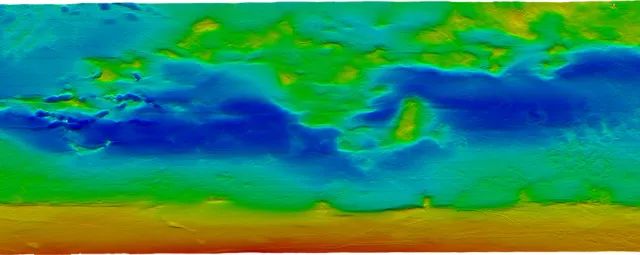
多波束成果图
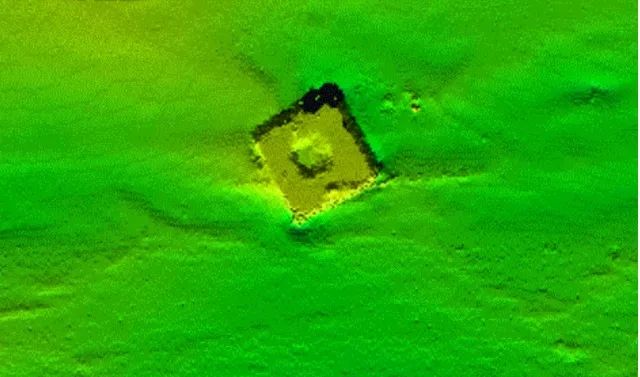
成果图局部(沉块)
通过实测数据分析,无人艇在逆流、顺流、船浪影响等状态下最大偏航距约为0.8米,侧流状态下最大偏航距约为0.5米。经对测量数据处理,形成0.1m格网(分辨率)的360×1000米2全覆盖水深图,水深范围在3.5-13米之间,中间水域为人工开挖航道,深度介于9-13米之间,部分地区有沙包突起。近边壁水深最浅,最浅处约3.5米,人工开挖航道与边壁有明显陡坎,水域中可见少量锚系拖痕,其中作业水域发现约5.5×5.5米不明物体,推测为水下沉块。
作业情况表明,该海洋测量无人艇技术规格优良,在复杂航道内完成了布放回收,自主航行,任务区水下地形多波束测量等工作内容,艇的整体航向保持性较好,边缘波束损失较小,噪点极少,对声学设备的噪声很低,所测数据质量优良,达到IHO44特优级标准,满足我国《海道测量规范》,满足海军测量作业要求。
应用结论
一是测量精度高。本次测量在2级海况以内,在过往大船及江水流速的影响下,无人艇循线精度可达到正负0.8米,有利于后期绘图处理。测量数据达到IHO44特优级标准。
二是解决了近岸浅水区难以测量的问题。M40吃水不到半米,相比有人艇能到达更浅的、水下环境复杂的海域作业,有效的解决了近岸浅水区难以测量的问题。
三是测绘效率高。5小时完成了单独本测区的测量任务,省时省力,降低人员的劳动强度和工作危险性。更可多条无人艇协同母艇作业,进一步提升效率。
四是测量成本低。M40为纯电力推进,相比柴油动力有人艇,省去了租船的费用,单位距离的燃料费用也大为降低。
相关资讯
更多- C-RTK 2HP | 助力无人船,效率精度双提升
- 深圳市委书记孟凡利到潜行创新调研,加快打造海洋经济优势产业,全力推动全球海洋中心城市建设实现大飞跃大提升
- 云洲智能无人艇再次刷屏!重温中国航展上的媒体焦点时刻
- 全球首发 | 潜行创新邀您11月8日揭晓革命性划时代的海洋智能装备
- 展会预告 | 云洲智能诚邀您参加2024海博会
- 云洲亮相中国人民警察大学警务大会 助力提升新质公安战斗力
- 一场别开生面的主题党日活动:珠海水务走进云洲 以新质生产力助智慧水务发展
- “云二代”们上课啦!——云洲智能暑期亲子研学活动圆满举办
- 广东省消防救援总队感谢信:云洲无人船助力洞庭湖洪灾救援
- 巴黎奥运背后的环保较量:潜行创新见证塞纳河的双重面貌