科学家对人机交互的研究是创建未来机器人“指南”的早期步骤
原创 2022-11-15 09:16 DDing 来源:AGV网
美国密苏里科技大学机械和航空航天工程系助理教授Yun Seong Song博士和他的互动机器人Ophrie
美国密苏里科技大学(MissouriS&T)研究人员的一项新研究显示,人类受试者在与机器人向导携手行走时,如何在行走过程中的不同时间内僵硬或放松手臂。研究人员对这些动作的分析可以帮助设计出更智能、更像人类的机器人向导和助手。
密苏里科技大学的研究人员在最近发表在《科学报告》杂志上的一篇论文中写道:"这项工作首次测量和分析了机器人引导者和人类跟随者之间地面物理互动过程中的人类手臂僵硬度。”
首席研究员,密苏里科技大学机械和航空航天工程助理教授Yun Seong Song博士,将这些发现描述为 "开发一个在与人类伙伴进行物理互动时与人类相似的机器人的早期步骤"。
"这与拥有能够与我们无缝互动的辅助机器人的想法有关。"Song说。
人类在执行某些任务时,经常在没有语言交流,甚至没有视觉提示的情况下进行互动,比如一个人帮助另一个人走路,或者一对夫妇跳华尔兹。在他们的《科学报告》论文中,研究人员描述了当机器人向导沿着三个不同的轨迹与人类一起行走时产生的作用力。
Song说:"乍一看,身体互动是一项动态任务,力量交换由互动者的被动属性决定。但如果你研究一下人类是如何处理身体互动的,你就会意识到,必须不断地处理信息和决策,以推断对方的意图。揭示发生这种情况的机制将有助于我们设计出能够与人类伙伴无缝互动的未来机器人。“
Song说:"即使没有明确的共同目标,两个人类伙伴也可以通过身体互动来完成协作任务。"Song和他的密苏里科技大学研究人员,心理科学副教授Devin Burns博士和Sambad Regmi博士,后者于2022年5月获得密苏里科技大学博士学位。" Burns帮助设计实验并 "严格解释数据",同时共同指导Regmi。
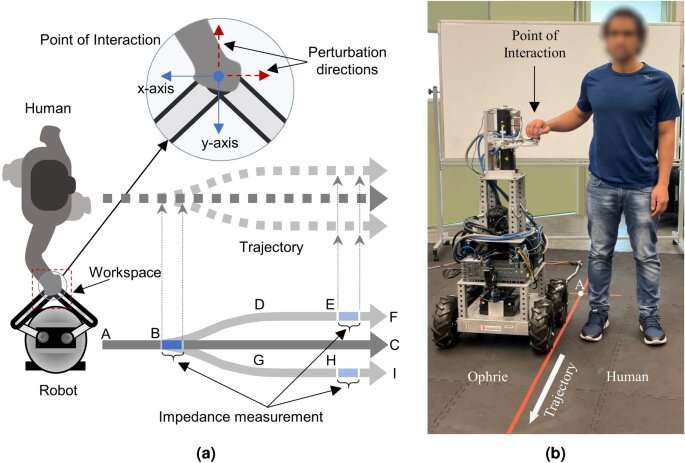
(a) 地面PHRI实验装置示意图(俯视图)。AB、BC、BD/BG、DE/GH和EF/HI的水平长度分别为1.5米、3.95米、1.25米、1.85米和0.85米。D和G(因此F和I)相距0.5米。(b) 一名研究人员手持机器人手柄,在试验开始时演示姿势。资料来源:《科学报告》(2022)。DOI: 10.1038/s41598-022-23496-z
研究人员使用他们最近开发的交互式机器人Ophrie,模拟了一项引导式行走任务,要求人类受试者在握住机器人手臂上的把手时闭上眼睛。Ophrie是Overground Physical Human Robot Interaction的缩写,它被编程为在行走的前1.5米(大约5英尺)内按直线轨迹移动,然后向左或向右偏离或继续直线轨迹。受试者被期望对通过手柄传递的触觉提示做出反应,以感知机器人的运动。
密苏里科技大学的研究人员在行走过程中的两个点测量了手臂的僵硬程度:一是当机器人可以采取三种不同的轨迹之一时,此时人类受试者对路径的确定性较低;二是在行走结束时,受试者对机器人的路径更加确定。
研究人员写道:"我们观察到,在机器人即将出现的轨迹未知的时刻,手臂的僵硬程度比它可预测的时刻要低。这提出了 "在地面物理互动过程中,为了更好地进行运动交流而进行手臂硬度调节的第一个证据。“
10名20多岁的人类受试者参加了这些实验。10人中有9人是男性,1人是左撇子,没有人报告任何神经系统疾病。
Song说:"了解人类和机器人之间的这种互动可以导致机器人设计的改进。互动式机器人助手可用于老年人护理、物理治疗和其他领域。"
Song说:"就像人类的伙伴一样,这些机器人将帮助建筑工人搬运货物,或者帮助有行动问题的老人从卧室走到厨房。我们希望这些机器人的性能有效,使用和沟通直观,互动安全,同时与人类伙伴保持身体接触。"